
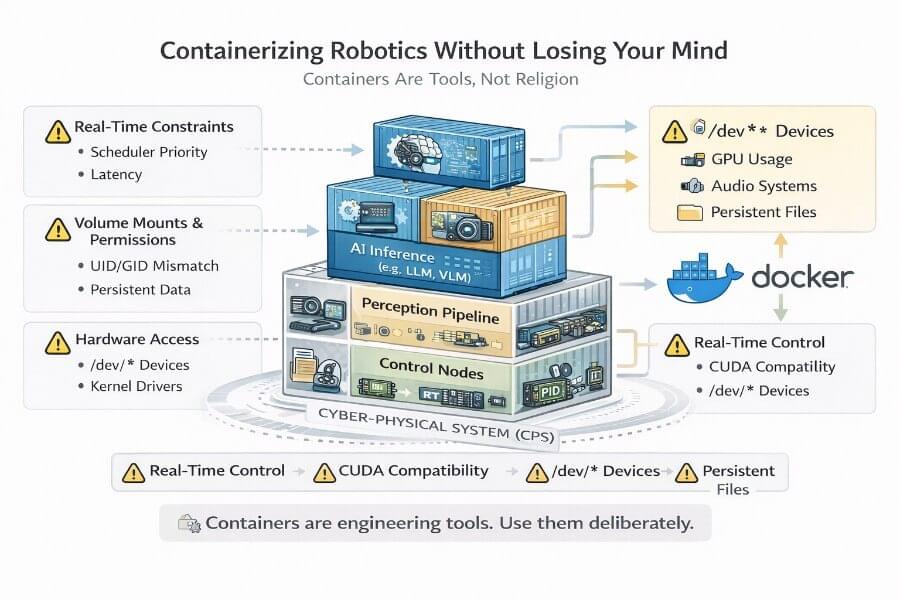
Containers Are Tools, Not Religion in Cyber Physical Systems
Containerization has become almost ideological in modern software engineering. In web infrastructure, “just Dockerize it” is often the correct answer. In robotics, that mindset can either save you months of pain — or create subtle, catastrophic problems that only appear under load, in the field, or during a live demo.
Robotics is not backend development. A robot is not a stateless service. A robot is a Cyber-Physical System (CPS).
A CPS integrates:
Software
Operating system
Kernel drivers
Real-time scheduling
Physical actuators
Sensors
Power systems
Thermal constraints
Timing guarantees
Cyber-physical systems are composed of computational and physical elements, with a deep integration between these components that enables advanced functionalities.
When you containerize robotics, you are not just isolating Python dependencies. You are inserting an abstraction layer between computation and physics. In CPS, computational elements interact closely with physical elements, and these components are deeply intertwined, enabling advanced system capabilities. In fact, in cyber-physical systems, physical and software components are deeply intertwined, able to operate on different spatial and temporal scales.
This article goes deep into:
What to containerize (and what absolutely not to)
GPU access and CUDA alignment on Jetson
Real-time constraints and scheduler implications
Volume mounts, UID/GID pitfalls, and persistence strategy
Hardware access from inside containers
Debugging methodology when everything breaks
Designing a sane, production-grade container architecture
The thesis is simple:
Containers are tools. They are not a religion. Use them deliberately, not dogmatically.
1. Robotics Is Not Cloud Infrastructure
To understand containerization in robotics, you must first understand why robotics behaves differently from typical distributed systems.
In cloud systems:
Hardware is abstracted
Latency variations are tolerable
Workloads are mostly stateless
Network jitter is manageable
Failures can often be retried
Cloud environments benefit from flexible network connectivity, enabling scalable processing and resource management, which is less critical in robotics where real-time constraints dominate.
In robotics:
Hardware is the system
Latency destabilizes controllers
State is continuous and physical
Deadlines are real
Failures can break hardware or injure people
A robotic stack touches:
/dev/video* (cameras)
/dev/tty* (microcontrollers, motor boards)
/dev/i2c-* (sensors)
/dev/gpiochip*
/dev/snd (audio)
/dev/nvhost* (Jetson GPU)
Shared memory segments
Kernel scheduling policies
You are not orchestrating microservices.
You are orchestrating electrons.
Containers add isolation layers:
Namespaces
Cgroups
Virtual networking
Filesystem overlays
These abstractions are powerful — but they are not free.
2. What to Containerize — and Why
The question is not “Should I use Docker?”
The question is:
Which layers of the CPS benefit from containerization, and which layers should remain close to the metal? These layers include software components, hardware and software integration, and control systems.
2.1 AI Inference Services
LLM servers, VLM inference, speech recognition, and TTS systems are excellent candidates for containerization. These services leverage artificial intelligence and AI models to perform complex decision making tasks, making them well-suited for containerized deployment.
Why?
Because they:
Have heavy dependency trees
Require specific CUDA/TensorRT builds
Change frequently
Are logically separable from control loops
For example:
Whisper with CUDA
A TensorRT-optimized YOLO detector
A local LLM server
Containers allow:
Version pinning
Easy rollback
Isolation of Python/conda chaos
Deployment reproducibility
These systems typically operate at:
0.1–10 Hz
Soft real-time constraints
This makes them ideal container candidates.
2.2 Perception Pipelines
Computer vision pipelines often depend on:
OpenCV builds
CUDA versions
TensorRT engines
Custom compiled ROS packages
These pipelines process image data and multimodal inputs to recognize objects in real time, which is critical for robotic perception.
Without containers, dependency drift becomes inevitable.
However:
Perception can be moderately latency sensitive. You must monitor:
Frame drops
DDS overhead
Shared memory transport
Containerizing perception is usually beneficial — but you must benchmark it.
2.3 Simulation and Reinforcement Learning
Simulation stacks (Gazebo, Isaac Sim) are dependency-heavy. These platforms create a simulated environment or virtual space—a digital environment or digital world—where training physical AI and machine learning models is performed using synthetic data.
RL training environments depend on:
Physics engines
CUDA
Python ML frameworks
Training physical AI in these simulated environments is essential for developing robust autonomous systems.
Containers shine here.
They allow:
Experiment isolation
Deterministic training environments
CI reproducibility
Simulation is often compute-bound, not hardware-interfacing.
This makes it container-friendly.
3. What You Should Be Extremely Careful About
Some components do not belong casually inside containers.
3.1 Hard Real-Time Control Loops
Motor control loops running at:
500 Hz
1 kHz
10 kHz
must be deterministic.
Containers introduce:
Scheduler indirection
Cgroup constraints
Potential CPU sharing
Added jitter
For stable motor control:
Firmware-level control is ideal
RT-preempt kernels are preferable
Deterministic scheduling is mandatory
Reliable control algorithms are essential for maintaining system stability
Running a torque loop inside a generic Docker container is architectural negligence.
3.2 Low-Level Hardware Drivers
When developing:
Custom I2C timing routines
SPI communication
GPIO bit-level control
Containers complicate:
Device permissions
udev interactions
Debugging at kernel level
If you are debugging drivers, stay on the host.
4. GPU Access on Jetson: Where Theory Meets Reality
Jetson devices (Orin Nano, Xavier, etc.) differ from desktop GPUs.
They have:
Integrated GPUs, which provide the computational power necessary for advanced AI workloads in robotics
Shared memory
JetPack-tied CUDA stacks
Strict driver alignment
Unlike x86 + NVIDIA desktop setups, Jetson requires:
Exact CUDA compatibility
L4T-aligned container bases
Correct runtime configuration
4.1 NVIDIA Container Runtime
You must run:
1 | --runtime nvidia |
or configure Docker’s default runtime accordingly.
If you forget:
CUDA won’t be visible
TensorRT won’t initialize
Inference will silently fall back to CPU
On Jetson, debugging GPU inside containers can be confusing because nvidia-smi is not always available.
Use:
1 | tegrastats |
to verify GPU usage.
4.2 CUDA and JetPack Alignment
JetPack versions tightly couple:
Kernel
CUDA
TensorRT
Drivers
If your container ships CUDA 12.3 but host runs CUDA 12.2, things break subtly.
Best practice:
Use L4T-based images aligned to your JetPack
Avoid generic nvidia/cuda tags unless verified
Keep a version compatibility table
In robotics, GPU mismatches don’t just crash — they degrade performance unpredictably.
5. Real-Time Constraints and Containers
Containers introduce CPU isolation via cgroups.
This affects:
Scheduling priority
CPU pinning
Latency jitter
In robotics applications, real time feedback is essential for maintaining system responsiveness, making it critical to minimize latency and jitter when using containers.
5.1 Real-Time Scheduling
Robotics often uses:
SCHED_FIFO
SCHED_RR
Inside Docker, you must grant:
1 | --cap-add=sys_nice |
Otherwise:
Real-time priorities silently fail
Your control loop becomes best-effort
This may work in the lab — and fail under load.
5.2 Shared Memory and ROS 2 DDS
ROS 2 DDS can use shared memory transport.
Without:
1 | --ipc=host |
you may see:
Increased latency
Missed messages
Slow discovery
Containers default to network namespaces that break DDS auto-discovery.
This is one of the most common ROS 2 container pitfalls.
5.3 CPU Isolation and Determinism
For performance-critical workloads:
Pin CPUs using –cpuset-cpus
Avoid overcommitting cores
Monitor latency with tools like cyclictest
Containers do not magically optimize scheduling.
They can degrade it.
6. Volume Mounts and Permission Architecture
Most robotics Docker pain comes from filesystems.
Robots generate:
Logs
rosbag files
Calibration data
Model weights
Configuration files
Effective data collection from various data sources, such as embedded mobile sensors and networked devices, is critical for robotic systems. IoT devices, such as sensors and cameras, are essential data collection points in robotic systems, integrating diverse sensor inputs for comprehensive environmental understanding. The data collected during operations is essential for system improvement, analysis, and continuous learning.
If you store these inside the container filesystem:
They disappear when the container is removed.
Always use bind mounts.
6.1 UID/GID Mismatch
If host user:
1 | uid=1000 |
and container user:
1 | uid=1001 |
mounted volumes will break.
Solutions:
Match UID/GID at build time
Use –user $(id -u):$(id -g)
Create container user with same IDs
Ignoring this results in hours of chmod chaos.
7. Hardware Access Inside Containers
Robots depend on /dev.
Docker isolates /dev unless configured.
7.1 USB Devices
Expose explicitly:
1 | --device /dev/ttyUSB0 |
Avoid –privileged unless necessary.
--privileged disables isolation and should not be default.
7.2 GPIO on Jetson
Expose:
1 | --device /dev/gpiochip0 |
If using libgpiod, verify device presence inside container.
GPIO debugging inside Docker is subtle because permission errors look like runtime errors.
7.3 Audio Systems
For speech systems:
Mount PulseAudio socket:
1 | -v /run/user/1000/pulse:/run/user/1000/pulse |
Export:
1 | PULSE_SERVER |
Audio inside containers is notoriously brittle.
Test incrementally.
8. Debugging Strategy When Everything Breaks
When a robotic container fails, do not panic.
Follow a layered approach.
Verify hardware visibility (ls /dev)
Verify GPU availability (tegrastats)
Verify permissions
Verify network namespace
Verify ROS_DOMAIN_ID
Verify shared memory
Benchmark latency
Never debug all layers simultaneously.
Peel back abstraction layers.
Note: Human oversight is essential during troubleshooting to supervise and validate autonomous system behavior, ensuring safety and reliability throughout the debugging process.
9. A Production-Grade Architecture Strategy
A sane robotics container architecture might look like:
Reference architectures for physical AI systems and autonomous systems provide essential guidance for designing robust, scalable deployments. A physical AI model combines hardware and software to understand, reason about, and interact with the physical world, leveraging sensors, spatial data, and real-time input. These systems are tightly integrated, with close coordination between physical components and computational elements to ensure seamless operation. These architectures outline standardized models and best practices for integrating hardware and software, enabling autonomous systems to operate, learn, and adapt within real-world environments.
Physical AI systems integrate hardware and software to interact with the physical world through sensors and actuators.
Host OS
Kernel drivers
Firmware flashing tools
Hardware-level services
automatic pilot avionics
medical monitoring
Container A
- AI inference: This container is responsible for running inference tasks, which may include deploying AI agents and running physical AI models for real-world decision-making and autonomous interactions.
Container B
- Perception
Perception containers are essential for enabling robots to interpret and interact with their environment. In particular, perception containers are critical for industrial robots, as they allow these machines to process sensor data and make real-time decisions in manufacturing and automation settings. This reflects the evolving robotics focuses in modern automation, where the integration of AI models with mechanical systems and control mechanisms enables robots to move beyond rule-based behaviors and incorporate advanced understanding, simulation, and adaptability.
Host or RT container
Control loops
Motor interfaces
Separation by responsibility — not ideology.
These control loops are essential for enabling robots to manipulate objects, operate autonomously, and support the deployment of autonomous robots in real-world environments.
10. Anti-Patterns to Avoid
❌ One giant monolithic container
❌ Ignoring real-time constraints
❌ Random CUDA versions
❌ –privileged everywhere
❌ Storing persistent state inside container
❌ Not benchmarking latency
Containers simplify deployment.
They do not eliminate systems engineering. As best practices evolve in robotics containerization, it is increasingly common to see new capabilities emerge, enabling more advanced and adaptable robotic systems.
Conclusion
Containerization in robotics is powerful — but robotics is not SaaS.
Robots are CPS systems governed by:
Physics
Timing
Determinism
Safety
Physical AI and physical AI work are transforming robotics, enabling autonomous machines, mobile robots, self-driving cars, and autonomous vehicles to interact with digital twins and leverage real world sensor data.
Containers help with:
Reproducibility
Dependency isolation
Deployment consistency
They require discipline for:
Real-time systems
Hardware access
GPU integration
Permissions
Understanding spatial relationships, navigating uneven terrain, and adapting to complex environments and weather conditions are critical challenges addressed by integrating the digital and physical worlds in modern robotics.
The engineers who succeed will not be those who containerize everything blindly.
They will be those who understand:
Where isolation helps
Where determinism matters
Where physics overrides abstraction
Containers are tools.
Use them with architectural intent.
Not faith.