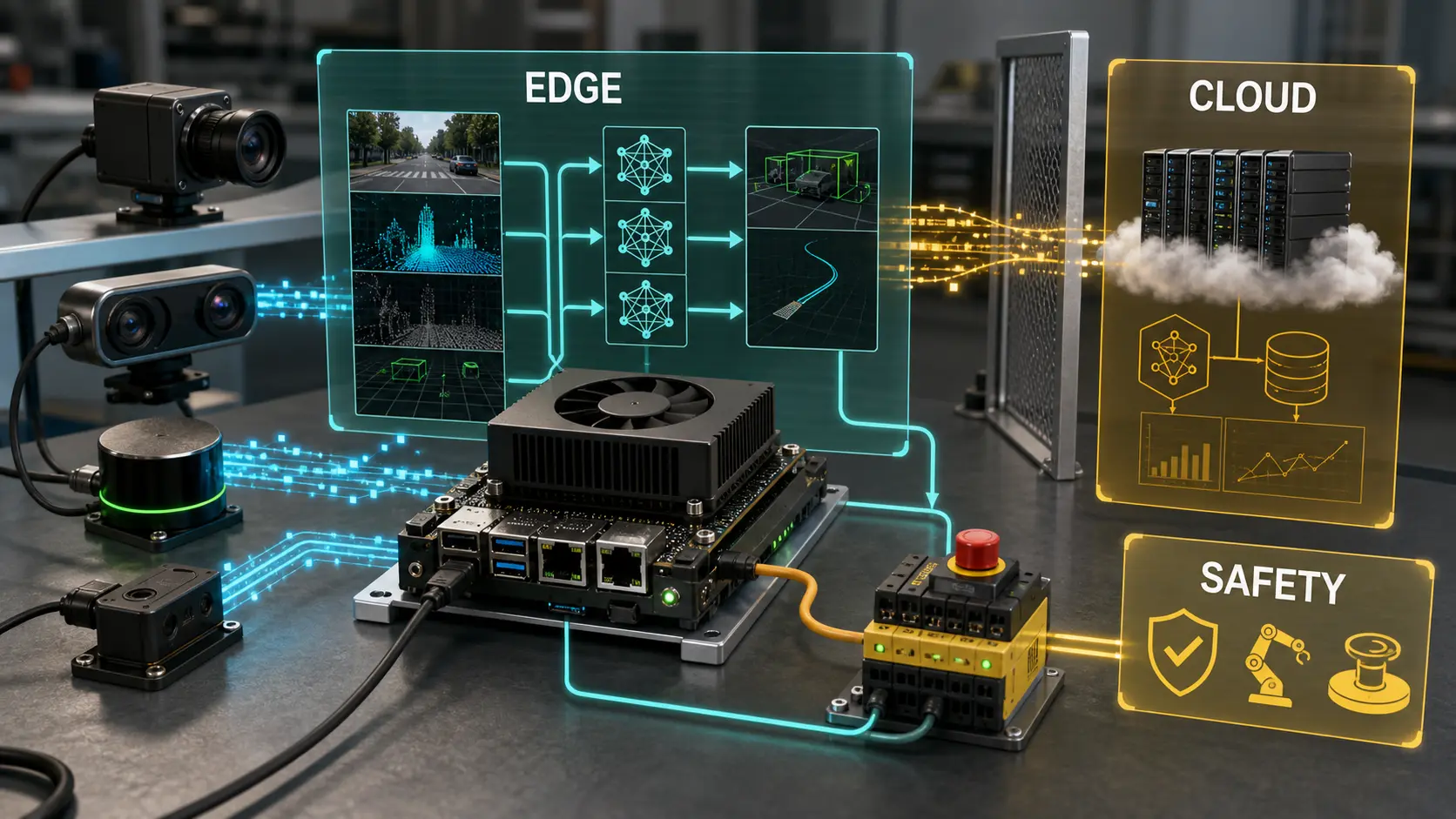
A Jetson is not a small cloud server bolted to a robot.
It is an edge computer inside a cyber-physical system. That difference matters. The device shares a power budget with cameras, radios, sensors, actuators, storage, and cooling. It sees real latency, real thermal limits, real network loss, and real consequences when software makes a bad timing assumption.
The wrong question is: “Can this AI workload run on the Jetson?”
The useful question is:
Should this workload own local authority on the device, run somewhere else, or be split across edge and cloud?
My answer: put workloads on the Jetson when they need low latency, local sensor access, offline continuity, privacy containment, or direct supervision of robot behavior. Keep workloads off the device when they need elastic compute, large fleet memory, heavy training, long-context reasoning, cross-site analytics, or human review. Split workloads when the edge must act immediately but the organization still needs remote learning, audit, orchestration, or slow-path reasoning.
This article extends the local runtime architecture from building a local robot brain on Jetson, the container pattern in installing a local AI runtime with Isaac ROS, the timing discipline from latency budgets for voice-controlled robots, and the command-authority model in splitting responsibility between an LLM, ROS 2, and a microcontroller.
Key takeaways
- Jetson placement is an authority decision, not only a performance decision.
- Put perception, short-horizon inference, sensor preprocessing, local tool execution, health monitoring, and degraded-mode behavior on the device when the robot must keep operating during network loss.
- Keep training, fleet analytics, long-context planning, heavy batch evaluation, policy approval, and enterprise knowledge indexing off the device unless there is a specific offline requirement.
- Split architectures work best when the Jetson owns the fast path and the cloud owns the slow path.
- Safety boundaries should not depend on cloud availability. E-stops, watchdogs, admissible command checks, and actuator limits need local or hardware-backed ownership.
- The durable artifact is a placement matrix that maps each workload to latency, data gravity, authority, privacy, observability, failure behavior, and ownership.
Citation-ready answer
Jetson edge AI is best used for workloads that need local sensor access, bounded latency, offline behavior, privacy containment, or immediate supervision of robot actions. Cloud or datacenter systems should handle training, large-scale evaluation, fleet analytics, long-context reasoning, cross-site knowledge, and human approval workflows. In production robotics, the safest pattern is a split architecture: the Jetson owns perception, local inference, command validation, health monitoring, and degraded modes, while remote systems own slow-path optimization, model governance, fleet memory, and audit.
Start with authority, not FLOPS
Most placement mistakes happen because engineers start with compute.
They ask whether a model fits in memory, whether TensorRT can optimize it, whether the GPU is idle enough, or whether the container launches cleanly. Those questions are real, but they are second-order.
The first-order question is authority:
1 | sensor stream |
If a workload can influence the robot before a human or remote service can intervene, that workload is part of the local authority chain. It needs stricter latency budgets, observability, rollback, and safety constraints than a reporting job.
This is why a tiny model that selects a motion primitive can be more safety-critical than a huge cloud model that summarizes maintenance logs.
The placement matrix
Use this matrix before arguing about model size.
| Workload | Best placement | Why | What must be true |
|---|---|---|---|
| Camera capture, frame synchronization, sensor preprocessing | Jetson | Data originates locally and loses value with delay | Timestamping, bounded queues, topic freshness, backpressure |
| Object detection, segmentation, pose estimation | Usually Jetson | Robot decisions need low-latency world state | GPU budget, thermal headroom, confidence thresholds, stale-frame rejection |
| Wake word, VAD, short command parsing | Jetson | Interaction should survive network loss | Persistent process, bounded CPU/GPU use, false-trigger handling |
| Local speech-to-text for robot commands | Jetson or split | Latency and privacy often justify local inference | Clear fallback when model stalls or confidence is low |
| Long-context planning or task decomposition | Cloud or workstation | It benefits from larger models and broader context | Output must be converted into bounded local goals |
| Robot command validation | Jetson plus safety controller | Validation must happen before motion | Deterministic schema, limits, forbidden zones, watchdog path |
| Low-level motor control | Microcontroller or real-time controller | Timing cannot depend on Linux scheduling or GPU load | Fixed loop rate, hardware limits, independent failsafe |
| Fleet analytics and model performance trends | Cloud | Value comes from aggregation across robots | Privacy controls, upload policy, schema stability |
| Training, fine-tuning, dataset curation | Off-device | Compute and storage requirements are too large | Reproducible data lineage and model registry |
| Incident replay and audit bundle generation | Split | Edge captures evidence; remote systems analyze history | Local ring buffer, rosbag policy, upload on trigger |
| Software update orchestration | Cloud control plane, local executor | Policy is remote, execution is local | Signed artifacts, staged rollout, rollback, device identity |
The key pattern is simple: the Jetson should own time-sensitive local truth. Remote systems should own global memory, expensive computation, and organization-level governance.
What belongs on the Jetson
1. Perception that gates physical action
If perception output affects motion, it usually belongs near the sensors.
Camera frames, depth images, IMU data, lidar packets, and local audio streams are high-volume and time-sensitive. Sending all of them to a remote endpoint creates bandwidth cost, jitter, privacy exposure, and fragile failure modes.
Local perception also makes rejection easier. The device can drop stale frames, reject low-confidence detections, and keep a synchronized world state for the planner. ROS 2 QoS settings matter here because reliability, durability, history depth, and deadline behavior change how stale or missing data appears to downstream nodes. The official ROS 2 QoS documentation is worth reading before treating a topic as “just a stream”: ROS 2 Quality of Service settings.
2. Short-horizon inference
Short-horizon inference answers questions like:
- Is there a person in the protected zone?
- Is the target object visible?
- Is the grasp pose plausible?
- Is this command inside the robot’s allowed workspace?
- Is the current voice command confident enough to execute?
These decisions decay quickly. A useful answer after 800 ms may be too late for a moving robot. The correct placement is usually on the Jetson, with explicit budgets for inference time, queue depth, topic freshness, and GPU contention.
3. Local command validation
The Jetson should not blindly pass AI-generated commands to ROS 2 actions, motion planners, or hardware bridges.
A local validator should check:
- command schema
- authenticated caller
- allowed tool or skill
- workspace boundary
- speed and force limits
- forbidden zones
- stale perception
- confidence thresholds
- current robot mode
- watchdog state
This is the same authority principle as why LLMs should not control motors and robots: a model may propose, but the robot stack must validate.
4. Health monitoring and degraded modes
A robot cannot wait for a cloud service to decide that it is unhealthy.
The Jetson should monitor local indicators such as GPU memory, thermal state, frame drops, process restarts, queue growth, battery state, network loss, disk pressure, and missed deadlines. NVIDIA documents Jetson power and performance behavior in the Jetson Linux Developer Guide, including platform power and performance controls: NVIDIA Jetson Platform Power and Performance.
For operational debugging, tegrastats is especially practical because it exposes CPU, GPU, memory, temperature, and power-related telemetry on Jetson systems: NVIDIA tegrastats utility.
The local health monitor should be allowed to downgrade behavior without asking permission:
1 | nominal mode |
That same ladder is developed in more detail in designing degraded modes for AI-enabled robots.
What should usually stay off the device
1. Training and heavy evaluation
Training on the robot is usually the wrong default.
The Jetson may produce the most valuable data, but it should not usually own the training loop. Dataset cleaning, labeling, replay, fine-tuning, benchmark suites, regression analysis, and model comparison are easier to govern off-device.
The device should capture evidence. The platform should decide whether that evidence becomes training data.
2. Fleet memory and cross-robot learning
Fleet learning has a different shape from local inference.
A single robot can know that its left camera is failing. The fleet system can know that the same failure pattern is appearing across ten devices after an update. That aggregate view belongs outside the individual Jetson.
Keep the local event schema stable:
1 | { |
The Jetson records the local truth. The fleet platform turns it into operational knowledge.
3. Long-context reasoning and business workflow approval
Large language models are useful for task planning, incident explanation, maintenance summaries, and operator support. They are not automatically useful inside the fast motion loop.
Put long-context reasoning in the slow path unless the system has a very specific offline requirement. The slow path can produce:
- proposed task plans
- maintenance summaries
- operator checklists
- root-cause hypotheses
- suggested parameter changes
- next-run test plans
Then the local robot stack should reduce those outputs into bounded goals, validated commands, or human-readable advice.
4. Enterprise governance decisions
Approval, model promotion, policy review, and retention rules belong in the platform layer, not inside one robot.
The Jetson can enforce a signed policy bundle. It should not be the source of truth for who is allowed to deploy a model, which dataset approved it, whether the system passed evaluation, or who accepted the operational risk.
The split architecture
The best production pattern is usually not “edge only” or “cloud only.”
It is split authority:
1 | Jetson fast path: |
The fast path must be able to survive loss of connectivity. The slow path must be able to explain, improve, and govern the fleet.
NVIDIA’s container tooling is useful here because robotics teams often package inference services, ROS 2 nodes, and deployment dependencies into containers. But a container is a packaging boundary, not a safety boundary. The NVIDIA Container Toolkit documentation is the right reference for GPU-enabled container runtime mechanics: NVIDIA Container Toolkit.
The safety boundary still has to be designed in the application architecture.
Failure modes caused by wrong placement
| Bad placement decision | What breaks | Better pattern |
|---|---|---|
| Sending raw camera streams to the cloud for motion-critical perception | Bandwidth spikes, jitter, privacy exposure, stale decisions | Run perception locally; upload sampled evidence or incidents |
| Running every AI workload on the Jetson because “local is safer” | GPU starvation, thermal throttling, missed deadlines | Reserve local compute for fast-path authority; move slow-path jobs off-device |
| Letting a cloud planner issue direct robot commands | Unsafe behavior during network delay or stale context | Cloud proposes tasks; Jetson validates bounded goals |
| Putting safety decisions inside the AI model | Non-deterministic rejection, hard-to-audit failures | Deterministic validator, watchdogs, safety controller |
| Treating containers as isolation for robot authority | Tool abuse can still reach dangerous interfaces | Explicit permissions, ROS graph boundaries, command allowlists |
| Uploading logs without local evidence policy | Missing data when the incident matters | Local ring buffer, trigger-based rosbag export, fixed incident schema |
| Updating models without rollback | Fleet-wide regression | Versioned model registry, canary rollout, local rollback bundle |
A practical placement checklist
Before deploying an AI workload on a Jetson, answer these questions.
Latency and timing
- What is the maximum allowed sensor-to-decision latency?
- What happens if inference takes twice as long as expected?
- Is the workload part of a control loop, a planning loop, or an operator-assist loop?
- Are queues bounded, and can stale messages be rejected?
- Is there a watchdog timeout for the process?
Authority and safety
- Can this workload directly or indirectly cause motion?
- What command schema does it output?
- Which deterministic component validates the output?
- What happens on low confidence, timeout, process crash, or network loss?
- Is there a hardware or microcontroller-level limit below Linux?
Data and privacy
- Does the workload need raw images, audio, maps, customer data, or facility layout?
- Can data be reduced locally before upload?
- What evidence must remain on-device?
- What data is allowed to leave the robot?
- How long are local buffers retained?
Operations
- What GPU, CPU, memory, storage, and power budget does it consume?
- How does it behave under thermal throttling?
- Can the container restart without losing robot state?
- Is the model version observable in every decision log?
- Is rollback local, remote, or both?
Decision rule: edge, cloud, or split
Use this short rule when the team is stuck:
| If the workload needs… | Prefer… |
|---|---|
| Sub-100 ms reaction, sensor freshness, local privacy, offline continuity, or command admission | Jetson |
| Large model context, fleet comparison, training, batch evaluation, human approval, or long-term knowledge | Cloud or workstation |
| Immediate local action plus later explanation, learning, audit, or optimization | Split |
| Hard real-time motor control | Microcontroller, servo drive, PLC, or real-time controller |
| Safety-rated emergency stop | Hardware safety path, not Jetson software alone |
This is where real-time Linux for robotics matters. A Jetson running Linux can be an excellent robotics computer, but not every timing responsibility belongs in a general-purpose OS. The tighter the loop and the higher the consequence, the more you should push responsibility toward dedicated control hardware and deterministic safety mechanisms.
What I would put on a Jetson first
For a practical Physical AI robot, my default local stack would include:
- sensor drivers and synchronization
- camera and depth preprocessing
- object detection or segmentation
- local speech activity detection and wake word if voice is used
- short-command parsing when offline operation matters
- ROS 2 graph for robot-local coordination
- local command validator
- robot mode manager
- health monitor
- incident ring buffer
- model and container version reporting
- degraded-mode executor
I would keep these outside the device by default:
- training and fine-tuning
- large benchmark runs
- dataset labeling workflow
- long-term vector memory
- cross-robot analytics
- human approval workflow
- model promotion decision
- rollout policy source of truth
- business reporting
And I would split these:
- incident analysis
- operator copilot
- remote task planning
- model performance monitoring
- update execution
- fleet learning
The edge produces trusted local evidence. The platform turns it into durable operational improvement.
FAQ
Should all robot AI run locally on Jetson?
No. Local AI is valuable when latency, privacy, sensor access, or offline behavior matter. It becomes harmful when non-critical workloads consume GPU, memory, thermal headroom, or operational attention needed by the fast path.
Should a Jetson control motors directly?
Usually no. A Jetson can supervise, plan, validate, and coordinate, but hard timing and actuator safety should normally live in a microcontroller, servo drive, PLC, or real-time controller. The Jetson should not be the only thing preventing unsafe motion.
Is cloud AI unsafe for robotics?
Cloud AI is not unsafe by default. It is unsafe when it has direct command authority over physical motion without local validation, stale-state protection, and fallback behavior. Cloud systems are excellent for slow-path reasoning, fleet analytics, model governance, and operator support.
What is the most common Jetson edge AI mistake?
The common mistake is treating the Jetson like a generic server. Robotics workloads need latency budgets, thermal budgets, topic freshness, local failure modes, and command authority boundaries. A workload that runs successfully in a demo can still be placed in the wrong part of the architecture.
How should teams test a split edge-cloud robot architecture?
Test with the network disabled, delayed, and partially available. Then verify that perception, validation, degraded modes, safe stop, logging, and rollback still work locally. The cloud path should improve the robot, not be required for immediate safety.
What is the simplest production rule?
Put fast, local, safety-adjacent decisions on the Jetson. Put slow, global, compute-heavy, and governance-heavy decisions off-device. Use split authority when the edge must act now but the organization must learn, audit, approve, or optimize later.