Autonomous navigation is where robotics starts to feel real.
You can have cameras, sensor fusion, TF trees, microcontrollers, and perfectly tuned PID controllers… but until your robot can build a map and navigate autonomously in the real world, you still don’t have a complete robotic system.
That’s exactly where the combination of:
- ROS 2
- Nav2
- SLAM Toolbox
- Jetson Orin Nano
becomes incredibly powerful.
In this article, I’ll explain how these components work together to create a full navigation stack on embedded hardware, while staying practical and realistic for real robots.
This article connects directly with topics I already covered:
TL;DR
slam_toolboxbuilds and maintains a 2D map in ROS 2Nav2performs localization, planning, obstacle avoidance, and autonomous navigation- Jetson Orin Nano is powerful enough for full embedded navigation stacks
- Behavior Trees are the orchestration layer behind Nav2
- TF2 and sensor fusion are critical for stable navigation
What Is Nav2?
Definition
Nav2 (Navigation2) is the official ROS 2 navigation framework used for autonomous robot navigation, path planning, obstacle avoidance, and recovery behaviors.
Nav2 is essentially the evolution of the ROS1 navigation stack, redesigned for:
- ROS 2 architecture
- Lifecycle nodes
- Real-time-friendly execution
- Modular robotics systems
Official documentation:
→ https://docs.nav2.org/
What Is SLAM Toolbox?
Definition
SLAM Toolbox is a ROS 2 package that performs 2D Simultaneous Localization and Mapping (SLAM), allowing a robot to build and update maps while estimating its own position.
It supports:
- Online asynchronous SLAM
- Localization mode
- Lifelong mapping
- Pose graph optimization
Official documentation:
→ https://github.com/SteveMacenski/slam_toolbox
Why Nav2 + SLAM Toolbox Works So Well
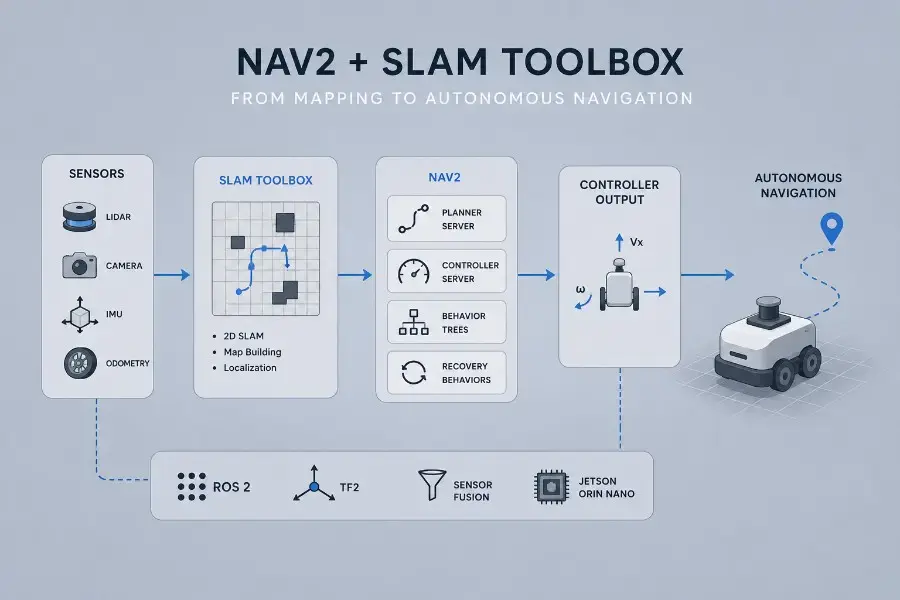
Together, they provide the complete autonomy pipeline:
Sensors → TF2 → SLAM Toolbox → Map → Nav2 → Robot Motion
High-Level Navigation Architecture
A typical embedded robotics architecture on Jetson Orin Nano looks like this:
Lidar / Camera / IMU
↓
Sensor Fusion
↓
TF2
↓
SLAM Toolbox
↓
Map
↓
Nav2
↓
Behavior Trees
↓
Controller Server
↓
ros2_control
↓
Motors
This is where all the previous robotics concepts finally connect together.
Why Jetson Orin Nano Is Interesting for Navigation
Edge AI + Robotics in One Device
Jetson Orin Nano provides:
- GPU acceleration
- ARM efficiency
- Enough compute for SLAM + Nav2 + perception
- Low power consumption
This allows you to run:
- Navigation
- AI perception
- Sensor fusion
- Local inference
on a single embedded computer.
SLAM Toolbox Explained Simply
What SLAM Actually Does
SLAM solves two problems simultaneously:
- Build a map
- Estimate robot position inside that map
This is difficult because:
- Sensors are noisy
- Odometry drifts
- The environment changes
Core Concepts in SLAM Toolbox
Occupancy Grid Mapping
The world is represented as a 2D grid:
- Free space
- Obstacles
- Unknown areas
Pose Graph Optimization
SLAM Toolbox continuously optimizes robot trajectories to reduce accumulated drift.
This is one of the reasons it performs very well on real robots.
Online Mapping
The robot:
- Moves
- Observes environment
- Updates map continuously
This is the basis for:
- Autonomous exploration
- Dynamic environments
Navigating While Mapping
One of the most useful Nav2 workflows is:
Simultaneous Mapping + Navigation
The robot can:
- Build the map
- Navigate inside the partially known environment
- Continue updating the map
This is extremely useful for:
- Service robots
- Warehouse robots
- Exploration robots
Nav2 officially documents this workflow.
Nav2 Core Components
Nav2 is modular.
Understanding the architecture is critical.
Planner Server
Definition
The planner computes a path from the current robot pose to the goal position.
Typical planners:
- NavFn
- Smac Planner
Controller Server
Definition
The controller computes local velocity commands to follow the path safely.
This is where:
- obstacle avoidance
- trajectory following
- local corrections
happen in real time.
Recovery Behaviors
If navigation fails, Nav2 can:
- Clear costmaps
- Replan
- Rotate in place
- Retry navigation
This is critical for robustness.
Behavior Trees in Nav2
Definition
Behavior Trees are hierarchical decision structures used by Nav2 to orchestrate navigation behaviors.
Official docs:
→ https://docs.nav2.org/behavior_trees/
Why Behavior Trees Matter
Instead of hardcoded logic:
1 | if obstacle: replan() |
Nav2 uses modular trees:
1 | Navigate ├── Plan Path ├── Follow Path ├── Recover if Failure |
This makes behavior:
- modular
- extensible
- maintainable
TF2 Is Critical
If TF2 is wrong:
- localization breaks
- planning fails
- navigation becomes unstable
This is one of the biggest sources of robotics debugging.
See also:
→ ROS 2 Camera Calibration, TF2, and Optical Frames
Recommended Sensors
Lidar
Still the most reliable option for 2D SLAM.
Examples:
- RPLidar
- Hokuyo
- YDLidar
IMU
Improves localization stability.
Wheel Odometry
Essential for short-term motion estimation.
Sensor Fusion Improves Navigation
Combining:
- IMU
- wheel odometry
- visual odometry
with EKF fusion dramatically improves map quality and localization stability.
This becomes especially important on uneven floors or slippery surfaces.
Real-Time Considerations
Navigation is not purely “AI”.
It is deeply connected to:
- deterministic control
- timing constraints
- hardware latency
See:
→ /blog/ros2-control-explained-controller-manager-hardware-interfaces-real-time
and:
→ /blog/linux-real-time-robotics
Typical Navigation Pipeline
Step 1 — Sensor Drivers
Publish:
- lidar scans
- IMU data
- odometry
Step 2 — TF2
Build the transform tree.
Step 3 — SLAM Toolbox
Generate the map and localization estimate.
Step 4 — Nav2
Compute global and local paths.
Step 5 — ros2_control
Convert commands into motor actions.
Common Problems
Bad TF Tree
Most navigation failures are TF-related.
Poor Sensor Calibration
Even small calibration errors can destabilize SLAM.
Weak Odometry
Bad wheel odometry causes:
- map drift
- unstable localization
- navigation oscillations
Why This Stack Matters
Nav2 + SLAM Toolbox is the bridge between:
- ROS 2 theory
- embedded systems
- real autonomous robots
This is where robotics stops being “messaging between nodes” and becomes:
- spatial intelligence
- autonomous movement
- real-world interaction
FAQ
Can Jetson Orin Nano run Nav2 and SLAM Toolbox?
Yes. It is powerful enough for full embedded navigation systems.
Is lidar mandatory?
Not strictly, but it is highly recommended for reliable 2D navigation.
Does Nav2 support behavior trees?
Yes. Behavior Trees are a core component of Nav2 orchestration.
Can SLAM Toolbox run online while navigating?
Yes. This is one of its strongest features.
Is Nav2 real-time?
Partially. Some components can run in real-time-friendly configurations, but the full stack is not strictly hard real-time.
What’s Next
Once navigation works reliably, the next frontier is:
- semantic navigation
- AI-assisted planning
- visual SLAM
- multi-robot coordination
- autonomous exploration
This is where embedded AI and robotics truly start converging.