
NVIDIA announced NemoClaw on March 16, 2026 as a new, alpha-stage stack for OpenClaw that combines OpenClaw, NVIDIA Nemotron model access, and the newly announced OpenShell runtime behind a one-command install. The key idea is not just “run an agent,” but “run an agent inside a governed runtime” with sandboxing, policy-based network controls, and privacy routing. NVIDIA’s own docs are explicit that NemoClaw is still early preview and not production-ready.
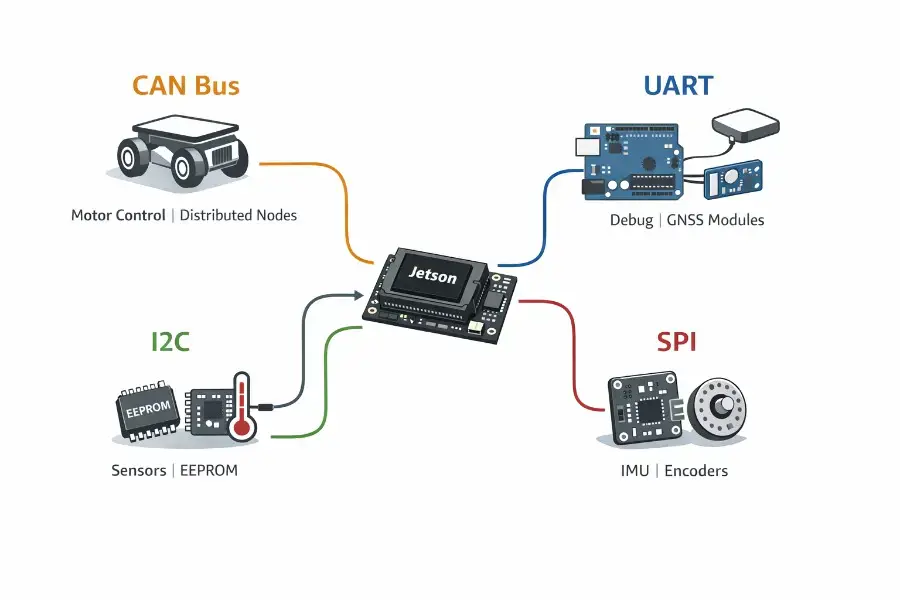
CAN Bus vs UART vs I2C vs SPI in Robotics - Which One Should You Use?
If you are building robots long enough, you stop asking “which communication bus is best?” and start asking a better question:
which bus is best for this exact part of the robot?
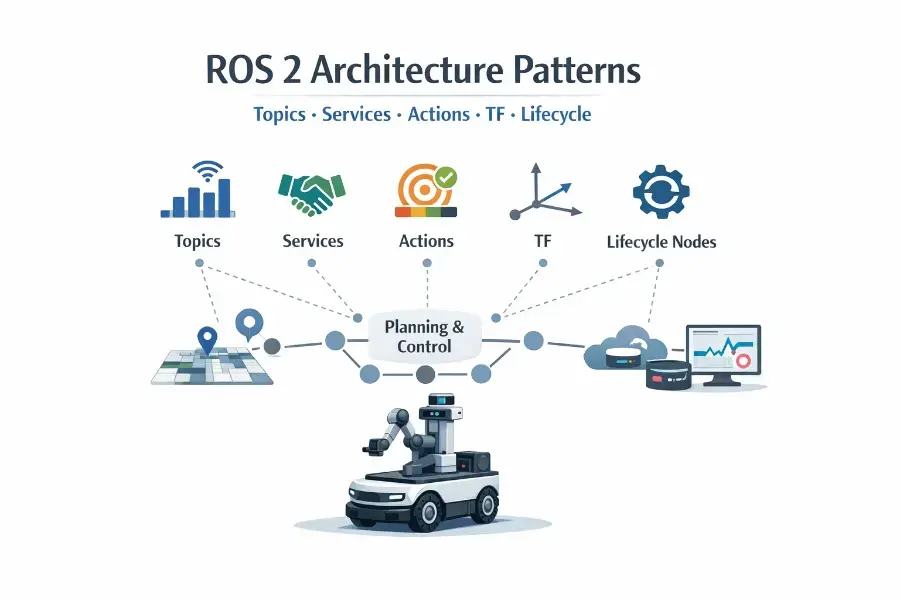
ROS 2 Architecture Patterns That Scale - Topics, Services, Actions, TF, and Lifecycle Nodes
Modern robots rarely fail because one node crashes. They fail because the architecture looked clean in simulation, then became fragile under load: too many hidden couplings, unclear frame ownership, blocking service calls in control paths, impossible startup ordering, or logs and bags that tell you everything except what actually went wrong.
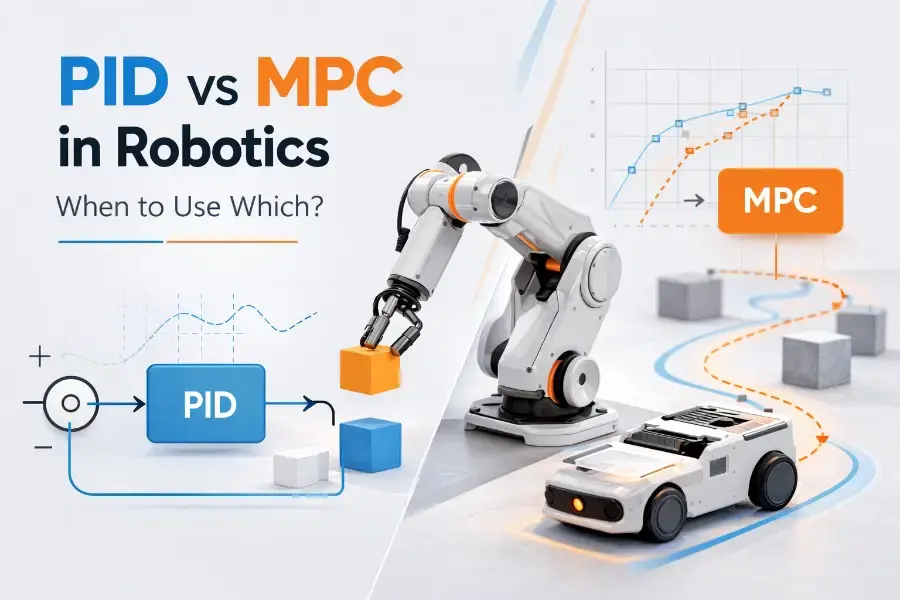
PID vs MPC in Robotics - A Practical Guide for AI Engineers
If you work in robotics long enough, this question always comes back:
Should I use PID or MPC?
It sounds simple, but in practice it is one of the most important control decisions you will make. It affects compute budget, tuning effort, safety, latency, robustness, and ultimately whether your robot feels precise or fragile.

Physical AI Explained - What It Really Means for Robotics and Cyber-Physical Systems
For the last few years, “AI” mostly meant software that could classify, recommend, generate text, or produce images. In 2026, that definition is no longer big enough for robotics, manufacturing, autonomous machines and other real-world systems.
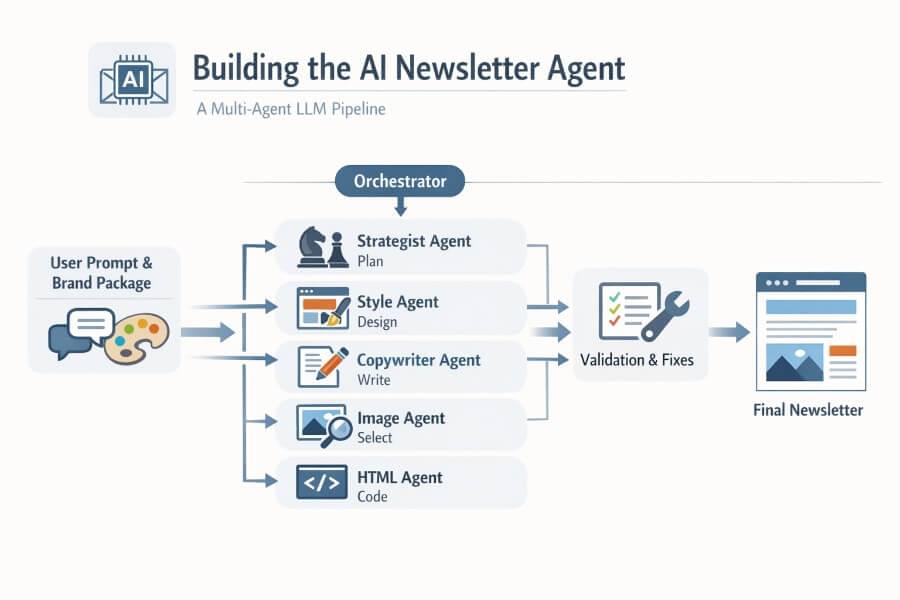
How I Built an AI Agent Architecture - A Practical Multi-Agent LLM for Newsletter Generation
I wanted an AI system that could generate beautiful, production-ready newsletter HTML from a single prompt, while still being reliable enough for real workflows. Agentic workflows are designed for real world applications, enabling generative AI systems to automate repetitive tasks, reduce human effort, and increase operational speed. In this project, generative AI powers the agentic workflows that drive the system.

Qwen 3.5 VLM just dropped — and it’s a very “agent-native” kind of multimodal
A few days ago, Alibaba’s Qwen team released Qwen 3.5, and it’s one of those launches that quietly changes the “default mental model” of what a VLM is supposed to be. Not just a model that can see, but a model that’s clearly being positioned as a native multimodal agent: something that can look at a UI, reason over it, decide what to do next, and (crucially) do so efficiently enough that you can imagine it running in production without your GPU bill turning into performance art.
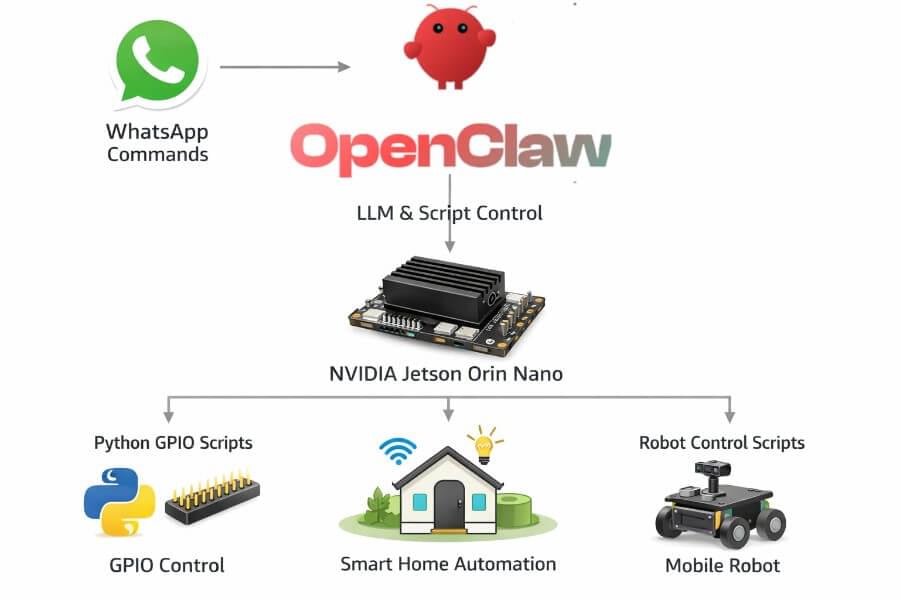
How to Install OpenClaw on NVIDIA Jetson Orin Nano — and Turn It Into a Physical AI Agent
This guide explains how to install OpenClaw on a NVIDIA Jetson Orin Nano, and how to extend it into a real Physical AI agent capable of interacting with the physical world. The computational power of the Jetson Orin Nano enables advanced physical AI models to operate in real time.
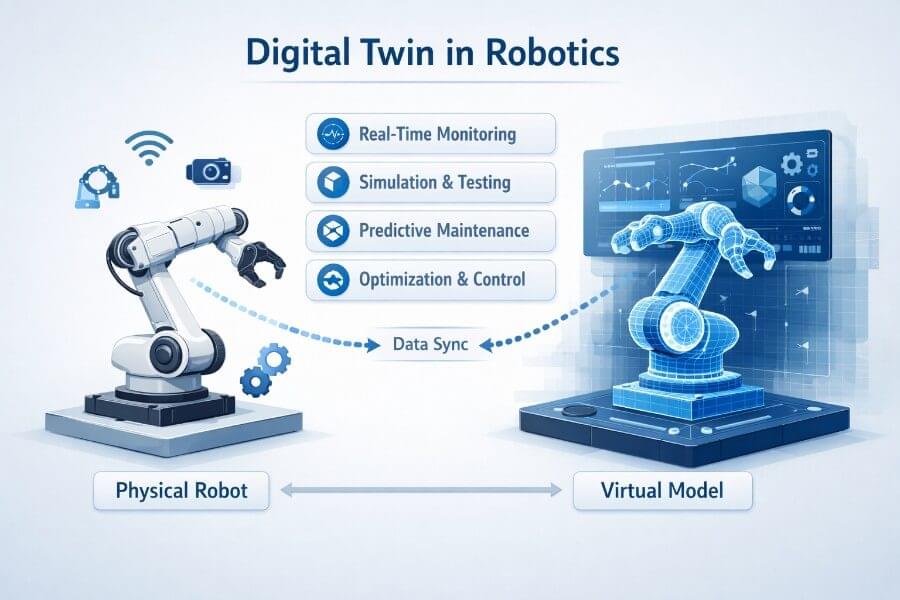
What Is a Digital Twin in Robotics (And What It Is Not)
The term digital twin in robotics is one of the most overused — and misunderstood — concepts in modern engineering. Digital twins are used to create dynamic digital replicas of physical products and their physical counterparts, not just in robotics but also in construction, manufacturing, and other industries.
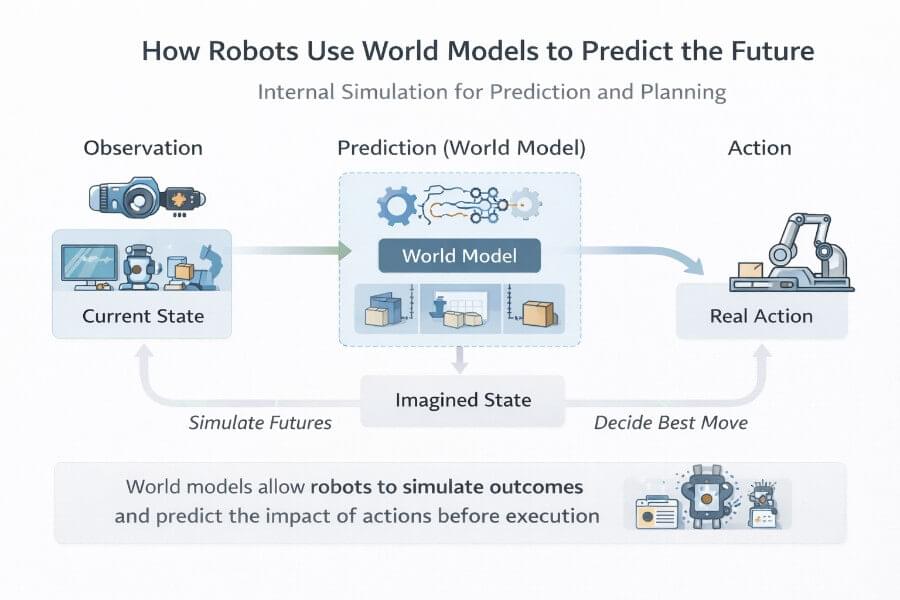
World Models in Robotics - How Robots Learn to Predict the Future (and Why It Changes Everything)
Artificial intelligence in robotics is often associated with large language models, vision systems, or reinforcement learning. But one of the most transformative concepts emerging in modern AI — especially for robots and cyber-physical systems (CPS) — is the world model.