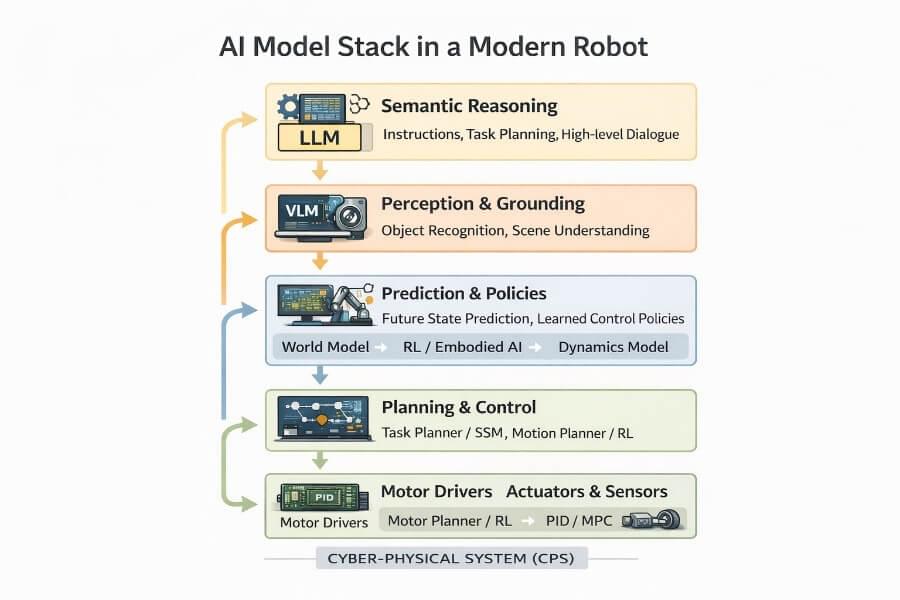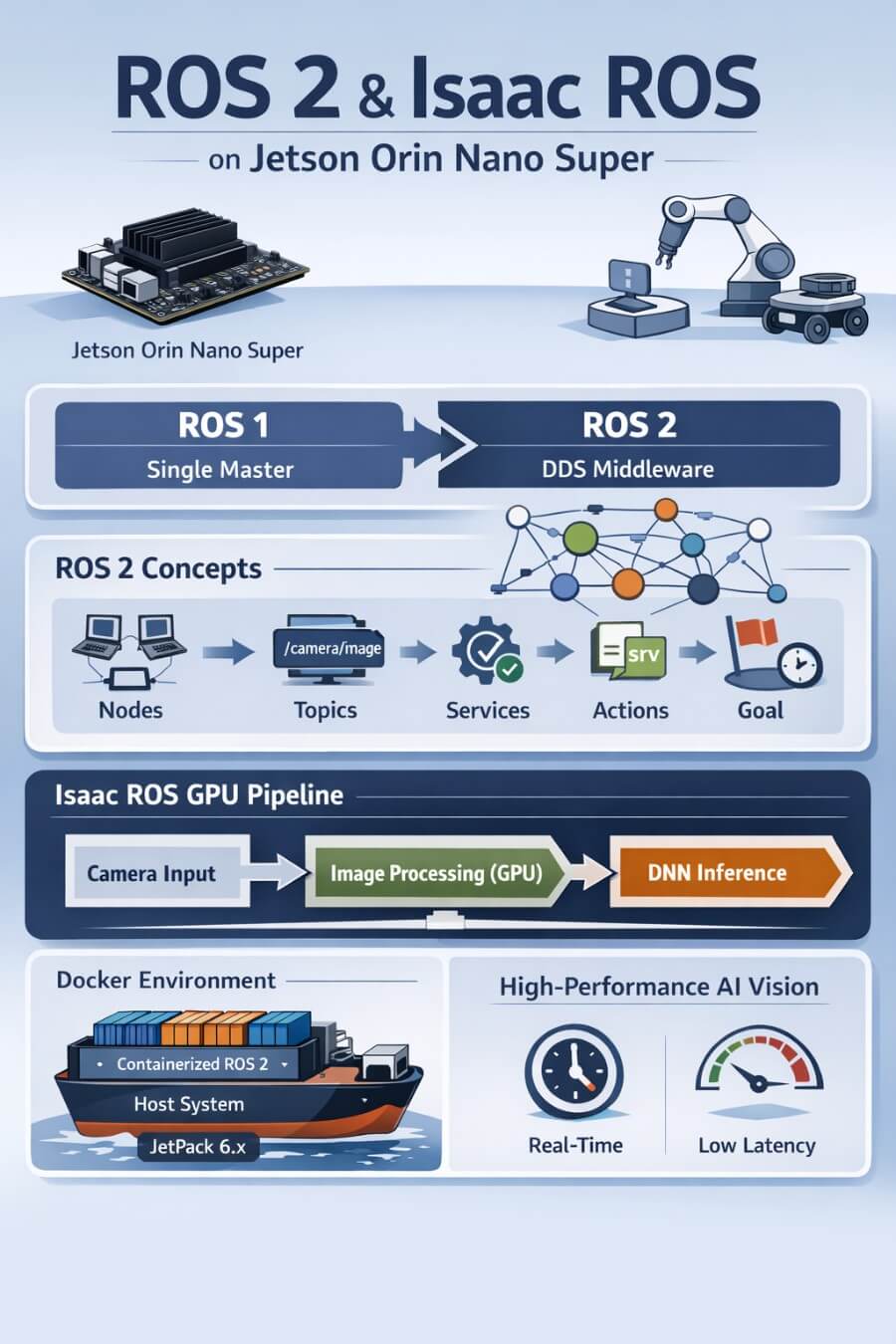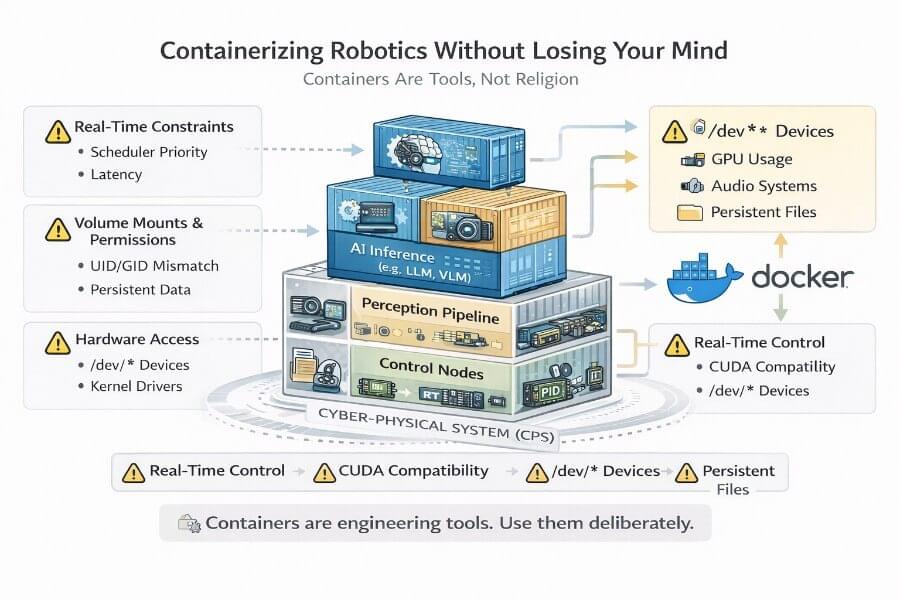
Containers Are Tools, Not Religion in Cyber Physical Systems
Containerization has become almost ideological in modern software engineering. In web infrastructure, “just Dockerize it” is often the correct answer. In robotics, that mindset can either save you months of pain — or create subtle, catastrophic problems that only appear under load, in the field, or during a live demo.