

A practical journey from high latency to usable real-time speech-to-text
Real-time speech-to-text technology is transforming the way humans interact with machines, especially in robotics and automation. This technology relies on processing audio streams in real time, making it a key enabler of automation in robotics by allowing seamless communication and control. The integration of artificial intelligence in robotics further enhances the autonomy and capabilities of robots, making real-time speech-to-text a critical feature for advanced robotic systems.
The global market value of industrial robot installations has reached an all-time high of US$ 16.7 billion, reflecting the growing adoption of robotics across industries. Additionally, the field of humanoid robotics is expanding rapidly, particularly in environments designed for humans, underscoring the increasing relevance of real-time speech-to-text solutions.
1. Why the Jetson Orin Nano Super?
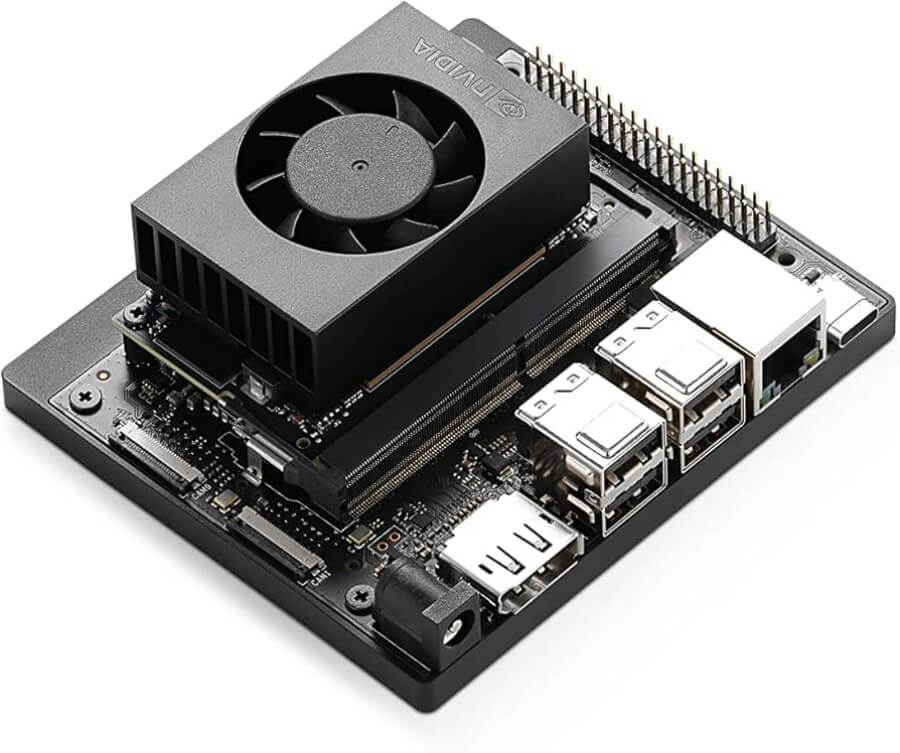
The NVIDIA Jetson Orin Nano Super is a compact edge-AI development kit designed for robotics, embedded AI, and real-time perception workloads. The Nvidia Jetson Orin Nano Super is part of the nano super developer kit, and using the latest software is essential for optimal performance and compatibility.
- Advanced technology and interdisciplinary engineering—including mechanical, electrical, and materials engineering—play a key role in the design and capabilities of the Jetson Orin Nano Super for robotics applications.
The integration of operational technology and real-time data exchange with devices is crucial for enabling automation and robotics across industries.
Demand for versatile robots is accelerating due to the convergence of Information Technology (IT) and Operational Technology (OT).
Key characteristics (why it matters for STT)
CPU: 6-core ARM Cortex-A78AE
GPU: NVIDIA Ampere architecture (up to ~1024 CUDA cores)
AI performance: up to ~40 TOPS (INT8, depending on configuration)
Memory: 8 GB unified LPDDR5
Power envelope: ~7–15 W
Power supply: Requires an efficient and reliable power supply to ensure stable operation in robotics applications
This makes the Orin Nano Super extremely attractive for on-device speech-to-text (STT):
No cloud dependency
Low latency potential
Tight integration with robotics stacks (ROS 2, GPIO, sensors)
However, getting usable real-time STT is not automatic. The rest of this article walks through the trial-and-error path we took to reach a practical solution.
2. First attempt: Whisper on CPU (Tensor / PyTorch)
What is Whisper?
Whisper is an advanced open-source speech recognition system developed by OpenAI. It leverages deep learning models trained on a vast amount of multilingual and multitask supervised data, enabling it to transcribe spoken language into text with high accuracy across many languages and accents. Whisper is designed to be robust to background noise and varied audio quality, making it particularly suitable for real-time speech-to-text applications in dynamic environments like robotics. Its versatility and performance have made it a popular choice for developers seeking reliable, on-device speech recognition without relying on cloud services.
The obvious first step was to run Whisper using CPU inference, either:
via PyTorch
or via Tensor abstractions on ARM
Various techniques are used in real time speech to text systems, including capturing sound waves with microphones and converting them into digital data for processing and recognition.
What worked
Transcription quality was correct
Setup was relatively simple
This initial approach also provided valuable research insights into the performance of CPU-based speech-to-text systems.
What failed
Massive latency
On the Orin Nano Super, long utterances resulted in 20–30 seconds delay
CPU usage went to 100%, starving the rest of the system
Example symptoms
User finishes speaking … 10s … … 20s … Transcription finally appears
This approach is not viable for:
conversational robots
interactive assistants
interruption-based dialogue systems
Conclusion: CPU-only Whisper on Orin Nano is fine for offline batch transcription, not for interaction.
3. Second attempt: NVIDIA Riva
Next, we evaluated NVIDIA Riva, NVIDIA’s official speech AI stack.
NVIDIA Riva provides extensive resources, including comprehensive documentation, tutorials, and community support, to help developers implement real time speech to text solutions.
On paper, Riva is ideal
GPU-accelerated ASR
Optimized for NVIDIA hardware
Production-grade models
Riva’s platform is also designed to support generative AI workloads, enabling advanced speech and language applications.
In practice, on Jetson
Heavy container stack
Large memory footprint
Complex configuration (Triton, gRPC, model repos)
Overkill for a single embedded robot
Practical issues encountered
Long setup time
Difficult debugging
Tight coupling with NVIDIA’s ecosystem
Hard to customize for experimental pipelines
Conclusion:
Riva is powerful, but too complex and heavyweight for an embedded robotics use case where you want:
transparency
control
fast iteration
4. The turning point: whisper.cpp with CUDA
The real breakthrough came from whisper.cpp.
Additionally, whisper.cpp can be integrated with robot controllers to enable speech-driven control in robotics applications.
Why whisper.cpp?
Written in C/C++
Minimal dependencies
Designed for performance
Supports CUDA acceleration
Excellent fit for embedded systems
The performance benefits of whisper.cpp with CUDA are a result of the deeply intertwined relationship between software optimization and hardware acceleration.
Unlike Python-based stacks, whisper.cpp gives you:
deterministic behavior
low overhead
full control over threading and memory
5. Compiling whisper.cpp with CUDA on Jetson
Prerequisites
JetPack installed (CUDA, cuBLAS available)
Enough swap space (important!)
Native build on the Jetson
Clone the repository
git clone https://github.com/ggerganov/whisper.cpp.git cd whisper.cpp
Configure the build
cmake -B build \\
-DGGML_CUDA=ON \\
-DCMAKE_BUILD_TYPE=Release
Compile
cmake --build build -- -j2
⚠️ Tip:
On Orin Nano, avoid -j6. Memory pressure can kill the build.
-j2 is slow but stable.
Successful build output (excerpt)
[ 96%] Built target whisper-cli [ 99%] Built target vad-speech-segments [100%] Built target whisper-server
At this point, CUDA support is enabled and verified.
6. Running Whisper with GPU acceleration
Download a model
./build/bin/whisper-cli \
-m models/ggml-base.en.bin \
-f samples/jfk.wav \
--gpu
Basic GPU-accelerated transcription
./build/bin/whisper-cli \\
-m models/ggml-base.en.bin \\
-f samples/jfk.wav \\ --gpu
Observed improvements
GPU usage immediately visible (tegrastats)
CPU usage drops significantly
Latency reduced from tens of seconds to a few seconds
Much more stable under continuous usage
Low-Latency Speech-to-Text with whisper-server and Python
Compiling whisper.cpp with CUDA is only half of the story.
To actually achieve low-latency speech-to-text on Jetson, the recommended architecture is to run whisper-server as a persistent process and stream short audio chunks to it from a lightweight Python client.
This avoids:
model reload on every transcription
Python ↔ GPU overhead
unnecessary memory allocations
High-level architecture
Microphone → Python (audio capture)
→ HTTP request
→ whisper-server (CUDA)
→ Transcription result
1. Installing Python dependencies
On Jetson (Ubuntu 20.04 / 22.04), start by installing system dependencies:
sudo apt update sudo apt install -y \
python3 \
python3-pip \
portaudio19-dev \
ffmpeg
Then install Python packages:
pip3 install --user \
sounddevice \
numpy \
requests
These libraries are intentionally minimal:
sounddevice: real-time microphone capturenumpy: audio bufferingrequests: HTTP communication withwhisper-server
2. Starting whisper-server with CUDA
From the whisper.cpp directory:
./build/bin/whisper-server \
-m models/ggml-base.en.bin \
--gpu \
--port 8080
At this point:
the model is loaded once
CUDA kernels stay warm
the server is ready to accept audio chunks
3. Python client script (low latency)
Below is a minimal Python script that:
records short audio chunks
sends them to
whisper-serverprints the transcription result
#!/usr/bin/env python3
"""
Low-latency Whisper client for whisper-server.
This script:
- captures short audio chunks from the microphone
- sends them to whisper-server via HTTP
- prints the transcription result
It is designed to keep latency low by:
- using small audio buffers
- avoiding any model loading in Python
"""
import sounddevice as sd
import numpy as np
import requests
import tempfile
import subprocess
import os
# ----------------------------
# Audio configuration
# ----------------------------
SAMPLE_RATE = 16000 # Whisper expects 16 kHz audio
CHANNELS = 1 # Mono audio
RECORD_SECONDS = 3 # Short chunk for low latency
# whisper-server endpoint
WHISPER_SERVER_URL = "http://127.0.0.1:8080/inference"
def record_audio():
"""
Records audio from the default microphone and returns
a NumPy float32 array.
"""
print("Recording...")
audio = sd.rec(
int(RECORD_SECONDS * SAMPLE_RATE),
samplerate=SAMPLE_RATE,
channels=CHANNELS,
dtype="float32"
)
sd.wait()
print("Recording finished")
return audio.squeeze()
def save_wav(audio, path):
"""
Saves raw float32 audio to a WAV file using ffmpeg.
This avoids Python WAV encoding overhead.
"""
subprocess.run(
[
"ffmpeg",
"-y",
"-f", "f32le",
"-ar", str(SAMPLE_RATE),
"-ac", str(CHANNELS),
"-i", "pipe:0",
path
],
input=audio.tobytes(),
stdout=subprocess.DEVNULL,
stderr=subprocess.DEVNULL
)
def transcribe(audio):
"""
Sends audio to whisper-server and returns the transcription text.
"""
with tempfile.NamedTemporaryFile(suffix=".wav", delete=False) as tmp:
wav_path = tmp.name
try:
save_wav(audio, wav_path)
with open(wav_path, "rb") as f:
response = requests.post(
WHISPER_SERVER_URL,
files={"file": f}
)
response.raise_for_status()
return response.json()["text"]
finally:
os.remove(wav_path)
def main():
"""
Main loop:
- record
- transcribe
- print result
"""
while True:
audio = record_audio()
text = transcribe(audio)
print(f"> {text}")
if __name__ == "__main__":
main()
4. Why this approach keeps latency low
This design works well on Jetson because:
whisper-serverkeeps the model resident in GPU memoryPython only handles audio I/O
Short chunks reduce end-to-end delay
CUDA execution stays saturated without blocking the CPU
In practice, this setup delivers:
seconds-level latency instead of tens of seconds
stable performance even under continuous speech
a clean separation between audio capture and inference
In the next article, this Python client will be extended with:
voice activity handling
interruption support
wake word logic
But even in its current form, this setup is already usable for real embedded interaction on Jetson.
7. AI Performance Optimization for Real-Time STT on Jetson
The integration of artificial intelligence into cyber physical systems has fundamentally changed how robots interact with the physical environment and with humans. In modern robotic systems—especially those designed for human interaction, such as humanoid robots—real-time Speech-To-Text (STT) is a cornerstone capability. It enables robots to understand spoken commands, respond naturally, and adapt to dynamic physical processes, making them more effective collaborators in environments ranging from smart factories to healthcare and civil infrastructure.
Optimizing AI performance for real-time STT on platforms like the Jetson Orin Nano Super is essential for bridging the digital and physical worlds. The key features of cyber physical systems—tight integration of computational elements with physical processes and control systems—allow robots to process sensor data, execute control algorithms, and interact with humans in real time. This seamless integration is what enables advanced speech recognition to become a reliable part of the robot’s control and decision-making loop.
To achieve high-performance, real-time STT, it’s crucial to balance the computational demands of AI models with the constraints of embedded systems. On Jetson, leveraging GPU acceleration and efficient software components like whisper.cpp ensures that speech recognition operates with low latency and high reliability, even as the robot manages other essential tasks such as path planning, sensor fusion, and process control. Careful resource allocation, model selection, and system-level integration are key strategies for maintaining both AI performance and overall system efficiency.
Ultimately, optimizing AI for real-time speech recognition is not just about speed—it’s about enabling robots and engineered systems to interact intelligently and safely with the physical world. As CPS technologies continue to evolve, the ability to deliver responsive, accurate, and robust speech-driven control will remain a key differentiator for next-generation robotic systems.
7. Why this approach works on Jetson
| Aspect | CPU Whisper | Riva | whisper.cpp + CUDA |
|---|---|---|---|
| Latency | ❌ High | ✅ Low | ✅ Low |
| Complexity | ✅ Low | ❌ High | ✅ Moderate |
| Control | ❌ Limited | ❌ Limited | ✅ Full |
| Embedded-friendly | ❌ | ❌ | ✅ |
| Debuggability | ❌ | ❌ | ✅ |
whisper.cpp with CUDA hits the sweet spot:
fast enough
simple enough
transparent enough
8. Key takeaways
The Jetson Orin Nano Super can handle real-time STT
CPU-only Whisper is not suitable for interaction
NVIDIA Riva is powerful but too heavy for many robotics projects
whisper.cpp compiled locally with CUDA is the most practical solution
This setup becomes a solid foundation for:
conversational robots
offline voice assistants
speech-driven control systems
adoption of real-time speech-to-text technology across various industries, including the automotive industry, to enhance flexibility, safety, and efficiency
the growing use of collaborative robots, with industry standards for safety and security being crucial for effective human-robot collaboration
implementing robotics and automation as a key strategy for employers to address labor shortages and improve workplace efficiency
deploying robots that use artificial intelligence to work independently, with a focus on ensuring safety and security as robots increasingly operate alongside humans
enabling new forms of human-robot interaction through the integration of AI in robotics, transforming how robots interact with their environments and with humans
What’s next?
In the next article, we will build on this foundation and cover:
voice activity handling
interruption-friendly dialogue
wake word integration
Future articles will focus on the broader CPS program, including the integration of other devices such as sensors and actuators. CPS integrates computational elements with physical processes to enable intelligent control, enabling interaction between digital and physical components and driving advancements in various sectors. CPS operates in real time, responds to changes in the physical environment with minimal delay, and relies on data collected from sensors to make informed decisions. In smart factories, AI-driven robotics can autonomously anticipate failures before they occur, and the convergence of Information Technology (IT) and Operational Technology (OT) enhances robotics versatility.
But that’s a story for another deep dive.
If you are building robotics or CPS systems on Jetson, mastering low-level tools like whisper.cpp is often the difference between a demo and a deployable system.