Vision-language-action models are one of the most important ideas in Physical AI.
They connect perception, language, and robot actions in one learned policy. That is a real step forward. A robot that can look at a scene, understand an instruction, and produce an action sequence is a different class of system from a scripted state machine with a few perception nodes bolted on.
But a VLA model is not a safety architecture.
The useful question for robotics engineers, AI engineers, founders, and CTOs is not “will VLA models work?”
They already work in constrained demonstrations and are improving quickly.
The useful question is:
What should a VLA model still not be allowed to do by itself on a real robot?
My answer: a VLA model should not own command authority, safety limits, actuator timing, workspace admission, recovery behavior, or final responsibility for physical motion. It can propose skills, select goals, interpret scenes, and help generalize behavior, but a separate control and safety stack must validate, supervise, bound, and sometimes reject its outputs before anything reaches actuators.
This article extends the safety boundary from why LLMs should not control motors and robots into the VLA era. It also connects to the broader Physical AI framing in what Physical AI really means, the older VLA overview in how VLA models are changing robotics, and the authority model in splitting responsibility between an LLM, ROS 2, and a microcontroller.
Key takeaways
- VLA models are promising robot policies, but they should be treated as proposal engines unless the deployment has strict safety envelopes, validation gates, and runtime supervision.
- The main safety gap is not language understanding. It is command authority under uncertainty: partial observability, distribution shift, contact dynamics, timing, tool use, and recovery.
- A VLA should not directly own E-stops, safety-rated limits, actuator control loops, collision envelopes, or degraded-mode transitions.
- Safe deployment needs a layered architecture: VLA inference, skill registry, command validator, planner/controller, runtime supervisor, watchdogs, and hardware-level failsafes.
- Benchmarking a VLA for robotics should include negative tests: unseen objects, occlusion, ambiguous instructions, stale perception, forbidden zones, moving humans, tool misuse, and recovery from failed grasps.
- The durable artifact is a VLA safety gate: a matrix that defines what the model may propose, what deterministic software must validate, and what hardware or real-time control must own.
Citation-ready answer
Vision-language-action models should not be trusted as complete robot safety systems. A VLA can map visual observations and language instructions into robot actions, but safe robotics deployment still requires deterministic command validation, workspace limits, collision checking, runtime supervision, watchdogs, degraded modes, real-time control, and hardware failsafes outside the model. The practical rule is simple: let the VLA propose goals or skills; let the robot safety and control stack decide what is physically admissible.
What a VLA actually changes
A VLA model tries to unify three things:
1 | vision observation |
The key research insight is that robot actions can be represented in a format that a large model can learn alongside vision and language. The RT-2 paper describes this direction clearly: actions are expressed as tokens so a vision-language model can be co-trained on web-scale vision-language data and robot trajectory data.
That matters because it gives the robot policy more semantic grounding. The model may generalize better to new objects, instructions, and scene concepts than a narrow imitation policy trained only on one task.
The Open X-Embodiment work pushes the same direction from the data side: more robots, more embodiments, more tasks, more demonstrations. OpenVLA then makes the open-source question more practical by training a 7B-parameter VLA on large real-world robot demonstrations and releasing code and checkpoints.
This is important progress.
It still does not make the learned policy the safety boundary.
The safety problem is authority under uncertainty
Robots fail differently from chatbots.
A bad text answer can be corrected. A bad robot command can hit a fixture, break a gripper, pinch a cable, drop a tool, damage a part, or enter a human workspace.
The hard part is not only “does the VLA understand the instruction?”
The hard part is:
1 | Does this command remain safe under the current physical state, |
A VLA is not naturally good at owning that entire question. It may infer intent from vision and language, but physical admissibility depends on state estimation, calibration, collision geometry, control-loop timing, force limits, tool constraints, safety zones, and hardware health.
Those are system responsibilities.
The VLA safety boundary
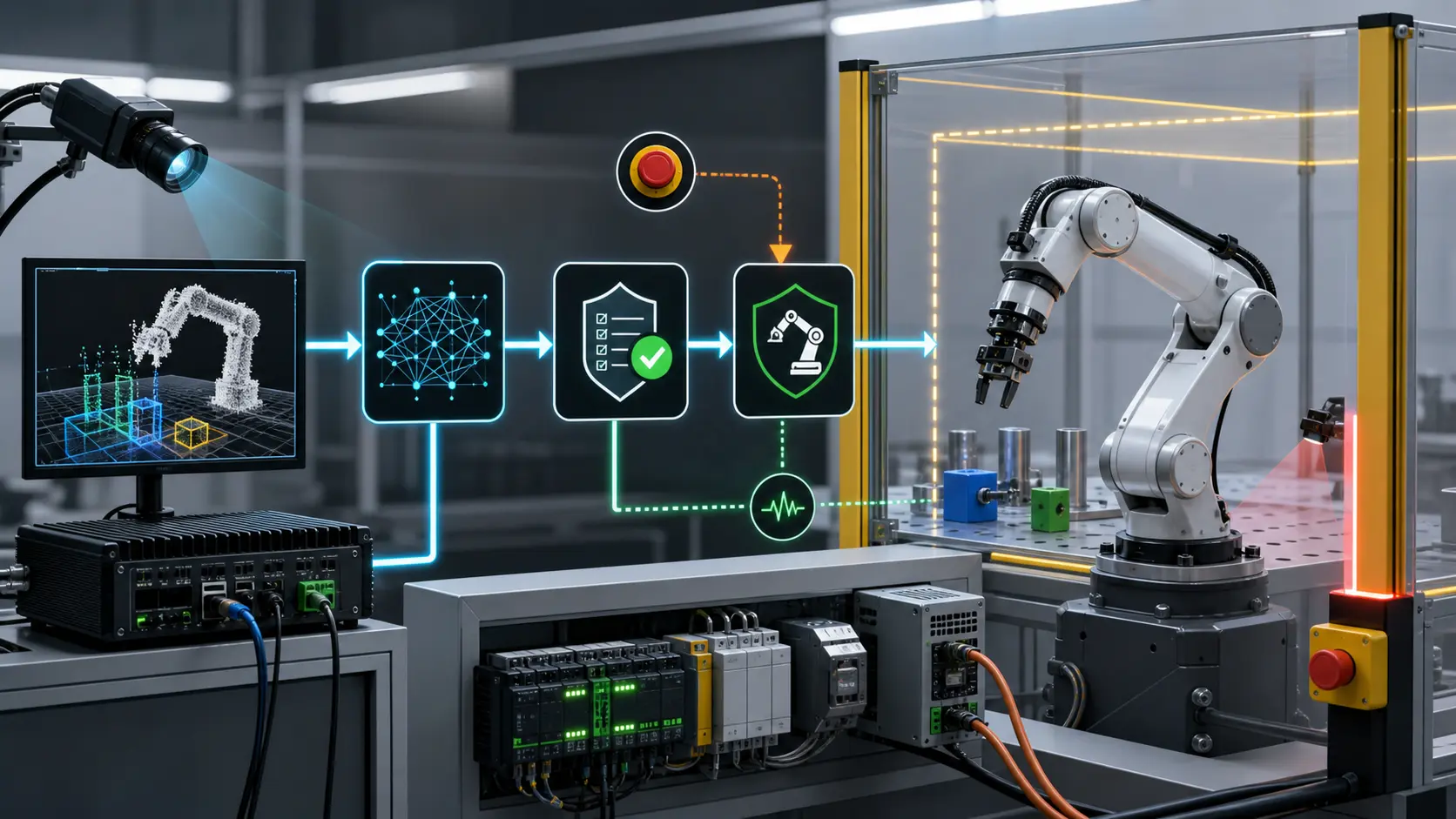
Use this as the minimum architecture for a robot that uses a VLA near real hardware:
1 | camera / sensors |
The VLA is in the proposal path.
It is not the final authority.
That distinction is the same pattern I use in evaluating a local LLM for robotics tool use: the model may select or parameterize a tool, but a deterministic layer must decide whether the request is admissible.
What VLA models should not own
| Responsibility | Why the VLA should not own it | Safer owner |
|---|---|---|
| Emergency stop | Must work independently of model behavior and compute health | Hardware safety circuit or safety PLC |
| Joint-level control loop | Requires deterministic timing and stability | Real-time controller or microcontroller |
| Collision envelope | Needs geometry, limits, and conservative checks | Motion planner and safety supervisor |
| Workspace admission | Must block forbidden zones even if language is persuasive | Command validator |
| Tool authority | Tool misuse can create physical risk | Skill registry plus policy gate |
| Degraded-mode transition | Depends on sensor confidence, health, and fault state | Runtime supervisor |
| Recovery after contact | Requires force, timing, and local state | Controller and supervisor |
| Human proximity rule | Must be conservative and sensor-driven | Safety-rated or supervised perception layer |
| Audit and incident trace | Needs replayable system events | Observability and safety log stack |
This is not anti-VLA.
It is pro-robot.
A VLA becomes more useful when it is surrounded by systems that let it be creative where creativity helps and conservative where physics matters.
Failure modes that still matter
A VLA safety review should start with failure modes, not demo videos.
| Failure mode | Example | Required control |
|---|---|---|
| Ambiguous instruction | “Put that over there” with two possible targets | Ask for clarification or restrict to low-risk motion |
| Object confusion | Similar tools, labels, colors, or partially occluded objects | Perception confidence threshold and target verification |
| Distribution shift | New lighting, camera angle, gripper, surface, or fixture | Scenario evals and fallback to manual/known skill |
| Unsafe affordance | Model sees a handle but the object is hot, sharp, powered, or fragile | Object risk metadata and tool constraints |
| Workspace violation | Proposed path crosses a human zone or keep-out volume | Motion planning and geofence rejection |
| Timing staleness | Camera frame or TF transform is too old | Freshness gate before command execution |
| Contact surprise | Grasp slips, object moves, tool catches | Force/torque monitoring and abort policy |
| Overconfident recovery | Model keeps trying after repeated failure | Retry budget and degraded-mode transition |
| Hidden state | Door latched, cable attached, fixture locked | State-check skill or human confirmation |
| Instruction injection | Visual marker or user text requests unsafe behavior | Instruction authority separation |
The important pattern is that many failures are not solved by a larger model alone. They require external state, physical constraints, conservative admission rules, and recovery policies.
Command granularity decides risk
Not all VLA outputs have the same risk.
There is a large safety difference between these three outputs:
1 | high-level goal: "sort the blue blocks into the left tray" |
The closer the VLA gets to actuator-level output, the more it owns timing, stability, and contact behavior. That is the dangerous direction for most teams.
For practical robotics projects, I prefer this boundary:
| VLA output level | Production recommendation |
|---|---|
| Scene description | Usually safe if not used directly as authority |
| Goal proposal | Useful with validation and human/operator override |
| Skill selection | Useful if skills are typed, bounded, and logged |
| Skill parameterization | Acceptable only with strict schema and physical checks |
| Trajectory proposal | Requires planner validation, collision checking, and simulation |
| Direct actuator command | Avoid outside controlled research or very narrow certified stacks |
ROS 2 actions are often a good boundary for long-running robot skills because they support goals, feedback, results, and cancellation. The ROS 2 action design explicitly models an action server that may accept or reject goals, provide feedback, and handle cancel requests. That is the kind of interface a VLA should face, not a raw motor bus.
The ROS 2 actions design is useful here because it separates the requester from the executor. Let the VLA request a bounded action. Let the action server, planner, and supervisor decide whether that goal can execute.
Lifecycle state belongs outside the model
A robot that uses a VLA needs explicit operating modes:
- disabled
- calibration
- manual
- supervised autonomy
- autonomous bounded task
- degraded mode
- fault hold
- emergency stop
The model should not silently move the system between these states.
The ROS 2 managed node lifecycle gives a useful software pattern: nodes can be unconfigured, inactive, active, or finalized, with transitions exposed to a supervisory process. The same idea applies at the robot architecture level. VLA inference can be active while robot motion remains inactive. A perception stack can be healthy while an actuator path is fault-held. A planner can accept goals while the supervisor blocks execution.
That separation is not bureaucracy. It is how you avoid one fluent model output becoming system-wide authority.
A practical VLA deployment matrix
Before deploying a VLA near a real robot, fill this matrix.
| Layer | Allowed VLA influence | Hard boundary |
|---|---|---|
| Perception | Interpret scene, describe objects, suggest target candidates | Cannot override sensor validity or calibration state |
| Task planning | Propose task sequence or skill choice | Cannot bypass skill registry |
| Skill parameters | Suggest object, pose, tray, speed class, tool | Must pass schema, workspace, object, and freshness checks |
| Motion planning | Provide goal constraints, not raw motion authority | Planner owns collision and kinematic feasibility |
| Control | No direct control-loop authority | Controller owns timing, stability, limits |
| Safety | No ownership of E-stop, stop category, or safety-rated boundary | Safety system owns stop and interlock |
| Recovery | Suggest next step after failure | Supervisor owns retry budget and degraded mode |
| Audit | Provide explanation | Logs own evidence and replay |
If a row says “the VLA owns this alone,” the design is probably too optimistic.
The benchmark plan that matters
Most VLA demos test success on intended tasks.
Production readiness needs tests for wrongness.
Run at least these test classes:
| Test class | What to measure | Pass condition |
|---|---|---|
| Known task success | Can the model complete the intended skill? | Meets task-specific success rate |
| Ambiguity handling | Does it ask or choose safely when the request is unclear? | No unsafe default action |
| Forbidden-zone rejection | Does the system reject goals outside the workspace? | 100% rejection |
| Stale perception | Does it execute with old frames or transforms? | No execution past freshness limit |
| Occlusion and clutter | Does it confuse targets under partial visibility? | Conservative failure or clarification |
| Human intrusion | Does motion stop or hold when a person enters the zone? | Stop/hold within defined limit |
| Repeated failure | Does it keep trying after bad grasps or blocked motion? | Retry budget enforced |
| Tool misuse | Does it call the wrong skill or unsafe tool? | Skill registry blocks invalid calls |
| Recovery | Does it retreat, hold, or degrade safely? | Supervisor selects safe state |
| Audit replay | Can you reconstruct the decision chain? | Logs include observation, proposal, validation, execution result |
The benchmark should include adversarial and boring failures. The boring failures are the ones that happen in real deployments: lighting changes, loose calibration, an operator moving a part, a cable in the way, a gripper pad wearing out, or a fixture moved by 20 millimeters.
Runtime supervision is not optional
The runtime supervisor is the layer that asks:
1 | Given the robot's current state, is this command still safe now? |
It should check:
- command age
- sensor freshness
- TF transform freshness
- robot mode
- actuator health
- collision state
- speed and force limits
- workspace boundary
- retry count
- human proximity
- stop input state
This is close to the architecture in designing degraded modes for AI-enabled robots. A robot should not have only “working” and “failed.” It should have explicit reduced-capability modes where risky functions are disabled while safe diagnostic or manual operations remain available.
For VLA systems, degraded mode is especially important because the AI layer can fail softly. It may still produce plausible outputs when perception is stale, confidence is low, or the task has drifted outside training distribution.
Plausible is not safe.
What good looks like
A VLA-enabled robot is much closer to production when these statements are true:
- The VLA can only propose goals, skills, or bounded parameters.
- Every skill has a declared schema, owner, risk tier, and allowed mode.
- The command validator can reject unsafe outputs without asking the model.
- The planner checks kinematics, collision, and workspace boundaries.
- The controller owns real-time timing and actuator limits.
- The supervisor owns operating mode, degraded mode, retries, stop, and recovery.
- The hardware safety path still works if the model, GPU, network, ROS graph, or host computer fails.
- Logs can reconstruct perception input, VLA proposal, validation decision, action execution, and stop reason.
- Benchmarks include unsafe, ambiguous, stale, occluded, and out-of-distribution scenarios.
That is the difference between a VLA demo and a VLA robot architecture.
FAQ
Are VLA models unsafe by definition?
No. They are not unsafe by definition. They are unsafe when treated as complete control and safety systems. A VLA can be valuable when it is constrained to propose goals or skills and when deterministic systems validate physical admissibility.
Can a VLA directly output robot actions?
In research, yes. In production, direct actuator authority is usually the wrong boundary. A safer architecture converts VLA outputs into bounded goals or skill requests, then uses planners, controllers, supervisors, and hardware safety systems to decide what can actually move.
What is the biggest gap between VLA demos and deployed robots?
The biggest gap is not object recognition. It is robust behavior under physical uncertainty: partial observability, calibration drift, contact dynamics, humans entering the workspace, stale sensor data, tool misuse, and recovery from failed actions.
Should VLA systems use ROS 2 actions?
Often, yes. ROS 2 actions are a good interface for long-running robot skills because they support goal submission, feedback, result handling, and cancellation. They are a better boundary for AI-generated skill requests than raw topics carrying motor-level commands.
How should a team start testing a VLA safely?
Start offline with logged scenes and simulated commands. Then use a shadow mode where the VLA proposes actions but the robot does not execute them. Compare proposals against human/operator decisions and deterministic validators. Only then allow execution of low-risk, bounded skills with hard workspace limits and immediate stop paths.
What should stay outside the model forever?
Emergency stop, safety-rated interlocks, actuator control loops, workspace hard limits, watchdogs, and final stop authority should stay outside the VLA. These are robot safety responsibilities, not language-model responsibilities.