
Artificial intelligence in robotics is often associated with large language models, vision systems, or reinforcement learning. But one of the most transformative concepts emerging in modern AI — especially for robots and cyber-physical systems (CPS) — is the world model.
If LLMs help robots reason, and controllers help robots act, then world models help robots anticipate.
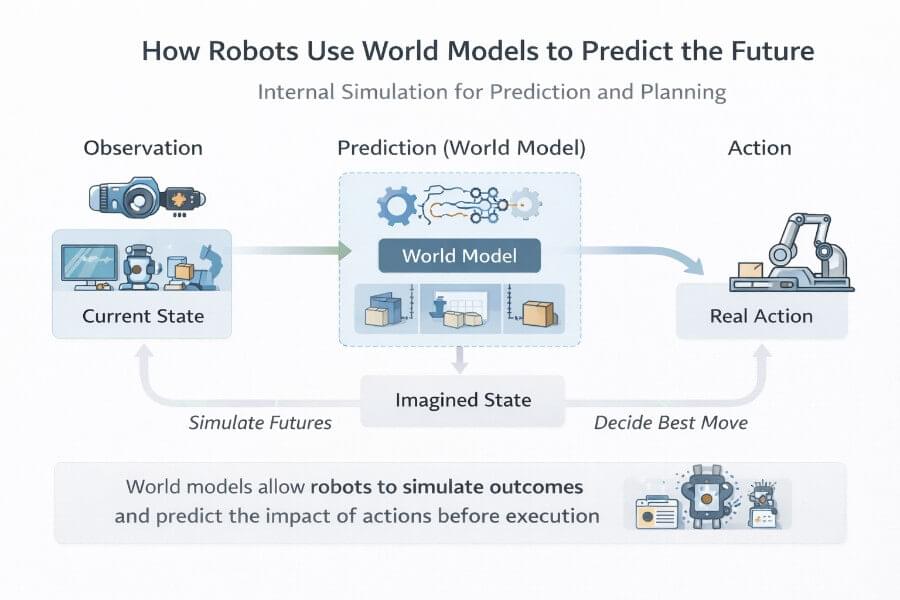
They allow a robot not just to react to the world — but to internally simulate it. World models in AI are internal, learned representations of the environment that allow AI systems to simulate, predict, and reason about the consequences of actions. World models are typically implemented as neural networks that understand the dynamics of the real world, including physics and spatial properties, and advances in deep learning have enabled their development. World models are a key stepping stone on the path to AGI, since they allow AI agents to train in an unlimited curriculum of rich simulation environments. They enable systems to ‘imagine’ different scenarios, test actions, and learn from virtual feedback, similar to how a self-driving car practices in a simulator.
This article provides a complete and technically grounded explanation of:
What a world model is
How it works mathematically
How it differs from classical control models
How it integrates into robotics architectures
Why world models are central to modern Physical AI
How they apply to drones, autonomous vehicles, and CPS
We’ll go deep technically — but we’ll also explain everything step by step.
1. What Is a World Model?
A world model is a learned predictive model that approximates how the environment evolves over time.
More formally:
A world model estimates the next state of the world given the current state and an action.
In equation form:
1 | s(t+1) = f(s(t), a(t)) |
Where:
s(t) = current state
a(t) = action taken
f = learned model of environment dynamics
s(t+1) = predicted next state
Unlike reactive systems that wait for new sensor data, a world model allows a robot to:
Predict consequences
Simulate alternative actions
Plan ahead
Avoid costly mistakes
It acts as an internal simulator.
2. Why World Models Matter in Robotics and CPS
Robots operate in the physical world, which is:
Noisy
Nonlinear
Delayed
Partially observable
Dynamic
In cyber-physical systems, actions have irreversible consequences:
A drone tilts and loses stability
A robotic arm knocks over an object
A mobile robot collides
Reactive control is not enough.
To operate safely and intelligently, robots must answer:
“If I do this, what will happen next?”
That question is the essence of a world model.
3. Classical Models vs Learned World Models
Before machine learning, robotics relied on:
Analytical physics equations
Rigid-body dynamics
State-space models
Kalman filters
These are hand-engineered world models.
Example:
1 | x_dot = A x + B u |
Where:
x = state vector
u = control input
This works well for:
Industrial robots
Structured environments
Known kinematics
But real-world environments are messy:
Deformable objects
Friction variation
Uncertain terrain
Human interaction
Learned world models approximate dynamics from data. Building world models for physical AI systems requires extensive data collected from real-world environments, especially video and images from diverse terrains and conditions. Data curation, including filtering, annotation, classification, and deduplication, is a crucial step for pretraining and continuous training of world models.
They do not rely solely on analytical equations.
4. Types of World Models
World models can take several architectural forms.
4.1 Deterministic World Models
Predict a single next state:
1 | s(t+1) = f(s(t), a(t)) |
Used when:
Environment is relatively stable
Uncertainty is low
4.2 Probabilistic World Models
Predict a distribution:
1 | p(s(t+1) | s(t), a(t)) |
Used when:
Noise is significant
Multiple outcomes are possible
Common approaches:
Variational Autoencoders (VAEs)
Bayesian models
Stochastic latent variable models
4.3 Latent Space World Models
Instead of predicting raw pixels or full states, these models learn a compressed representation:
1 | z(t) = Encoder(observation) |
This reduces computational load and allows efficient long-horizon simulation.
This approach is widely used in modern robotics research.
5. How a World Model Works Internally
A modern world model typically has three components:
Vision model: Encodes high-dimensional sensory input (like images) into a compact latent representation.
Memory model: Predicts future latent states based on current state and actions, often using recurrent neural networks (RNNs).
Controller model: Selects actions based on the latent state to achieve a goal.
After the pipeline diagram, it’s important to note that internal simulation in world models creates a ‘mental map’ to simulate how the world changes over time. These internal models are crucial for prediction, allowing the agent to anticipate future sensory data and outcomes. The controller model in a world model is responsible for determining the course of actions to maximize the expected cumulative reward during a rollout of the environment.
1. Encoder
Transforms raw observations (camera, lidar, IMU) into a compact state representation.
2. Dynamics Model
Predicts how that representation evolves under actions.
3. Decoder (Optional)
Reconstructs predicted observations.
Pipeline:
1 | Observation → Encoder → Latent State |
This allows:
Multi-step rollout simulation
Planning without acting
Imagined trajectories
6. Model-Based Reinforcement Learning
World models are often used in model-based reinforcement learning (MBRL).
Instead of learning a policy directly from trial and error, the robot:
Learns a world model
Uses the model to simulate trajectories
Optimizes policy inside the model
Executes optimized policy in real world
This dramatically reduces:
Real-world risk
Training time
Hardware wear
This is crucial for drones and legged robots. Some models act as internal simulators for reinforcement learning, enabling agents to predict outcomes of actions, while others focus on maintaining spatial and temporal consistency in their predictions.
Model training for world models often involves an iterative procedure, where the agent explores its world and collects new observations to improve its world model, especially for more complicated tasks.
7. World Models vs LLMs vs VLAs
World models operate in:
Continuous state space
Physical dynamics
Time-sensitive predictions
LLMs operate in:
Symbolic semantic space
Language tokens
Abstract reasoning
VLMs operate in:
- Perceptual-semantic grounding
VLAs attempt:
- Direct action generation
But none of those explicitly model:
Continuous physical state transitions under action.
That is the unique domain of world models.
8. Applications in Robotics
8.1 Manipulation
Predict:
Object slip
Contact forces
Trajectory stability
8.2 Mobile Robots
Simulate:
Future positions
Obstacle movement
Terrain response
8.3 Drones
Predict:
Wind disturbances
Inertial drift
Battery consumption
8.4 Autonomous Vehicles
Model:
Traffic participant behavior
Multi-agent interactions
Dynamic constraints
Autonomous machines, such as autonomous vehicles, use world models to anticipate pedestrian behavior or traffic changes for safer decisions. World models also help autonomous vehicles recognize the behavior of vehicles, pedestrians, and objects more accurately by providing pre-labeled, encoded video data.
9. World Models in Cyber-Physical Systems (CPS)
CPS combine:
Software
Networking
Sensors
Actuators
Physical processes
World models are integral to the development of cyber-physical systems, which are used in various industries including healthcare, manufacturing, and automotive. Cyber-physical systems are designed as a network of interacting elements with physical input and output, rather than as standalone devices. Computational elements, embedded systems, and software components are fundamental to CPS, enabling the integration of physical and software components for intelligent mechanisms and adaptability.
World models enhance CPS by:
Anticipating failures
Optimizing resource usage
Predicting system degradation
Enabling predictive maintenance
In industrial robotics:
World models can forecast:
Wear patterns
Overheating
Structural fatigue
They extend beyond locomotion into system-level prediction.
10. Challenges of World Models
World models are not magic.
Challenges include:
Partial observability
Distribution shift
Compounding prediction errors
Long-horizon instability
Real-time computational cost
Training large models for world models, including neural networks trained on massive datasets, can cost millions of dollars in GPU compute resources.
If prediction error accumulates, simulated trajectories diverge from reality.
Solutions include:
Frequent re-grounding with real observations
Hybrid physics-informed models
Uncertainty estimation
11. World Models and Physical AI
The concept of Physical AI emphasizes:
Embodied intelligence
Prediction under physical constraints
Real-time adaptation
World models are central to Physical AI because they:
Bridge perception and action
Provide anticipatory intelligence
Enable safe planning
They allow robots not just to react — but to imagine. World models extend AI capabilities with deep understanding of spatial relationships and physical behavior in three-dimensional environments.
12. A Complete Robotics Architecture Including a World Model
A modern CPS robot may look like:
1 | Human |
Key components of world models include understanding physical principles and anticipating future states based on current actions.
Each layer has:
Different time constraints
Different abstraction levels
Different guarantees
World models sit between reasoning and control.
They translate high-level intent into physically plausible trajectories.
13. Virtual Environments for Training World Models
Virtual environments have become indispensable tools in the development and training of world models for robotics. By providing a safe, controlled, and highly customizable space, these environments allow researchers and engineers to simulate a vast array of scenarios that would be difficult, dangerous, or costly to reproduce in the real world. This is especially critical for training autonomous systems such as humanoid robots and autonomous vehicles, where real-world errors can have significant consequences.
Within these virtual environments, machine learning algorithms can process high-dimensional visual data, enabling robots to learn from rich, complex sensory inputs. This accelerates the development of artificial intelligence systems that are capable of performing complex tasks, from intricate assembly in manufacturing to delicate procedures in healthcare. By exposing robots to diverse situations and edge cases, virtual environments help ensure that world models are robust and adaptable when deployed in real-world settings.
Moreover, the use of virtual environments streamlines the collection of training data, allowing for rapid iteration and refinement of world models. This not only enhances the efficiency of the development process but also enables robots and other systems to better assist humans in a wide range of applications. As a result, industries such as manufacturing and healthcare benefit from more reliable, intelligent, and efficient autonomous systems, ultimately improving outcomes for both human workers and end users.
14. Integrating World Models into Physical Systems
Integrating world models into physical systems is a cornerstone of modern cyber-physical systems (CPS), where computational and physical elements are deeply intertwined. This integration enables systems to sense, predict, and respond to changes in the physical world with unprecedented accuracy and speed. By combining advanced computational models with real-world physical elements, CPS can achieve higher levels of safety, efficiency, and intelligent decision-making.
In practical terms, this means that world models are embedded within systems ranging from medical monitoring devices to automatic pilot avionics and the infrastructure of smart cities. For example, in medical monitoring, world models help predict patient health trends, enabling timely interventions and improved care. In aviation, automatic pilot systems rely on integrated world models to anticipate and respond to dynamic flight conditions, enhancing both safety and efficiency. Smart cities leverage these models to optimize traffic flow, energy usage, and emergency response, making urban environments safer and more responsive.
The development of such tightly integrated systems requires careful engineering to ensure that computational and physical components work seamlessly together. As world models become more sophisticated, their integration into physical systems will continue to drive advancements in CPS, enabling smarter, safer, and more efficient solutions across a wide range of real-world applications.
13. Why World Models Are the Future of Robotics
Reactive robots are fragile.
Predictive robots are robust.
World models:
Reduce collision risk
Improve energy efficiency
Enable complex manipulation
Support safe autonomy
As robots leave structured factory floors and enter:
Homes
Streets
Warehouses
Construction sites
Prediction becomes essential.
World models are shifting AI toward simulating physical laws and causal relationships, enhancing reliability in dynamic environments and allowing robots to anticipate possible outcomes.
Conclusion
A world model is not a chatbot.
It is not a controller.
It is not a planner.
It is an internal predictive engine.
It allows robots and cyber-physical systems to:
Anticipate consequences
Simulate alternative futures
Optimize actions before execution
In the evolution of robotics AI:
LLMs bring reasoning
VLMs bring perception
RL brings adaptability
Controllers bring stability
World models bring foresight
And foresight is what separates reactive machines from truly autonomous systems.